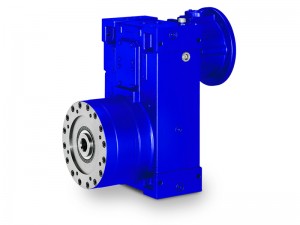
หน่วยเกียร์ความแม่นยำของหุ่นยนต์

ขนาด: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
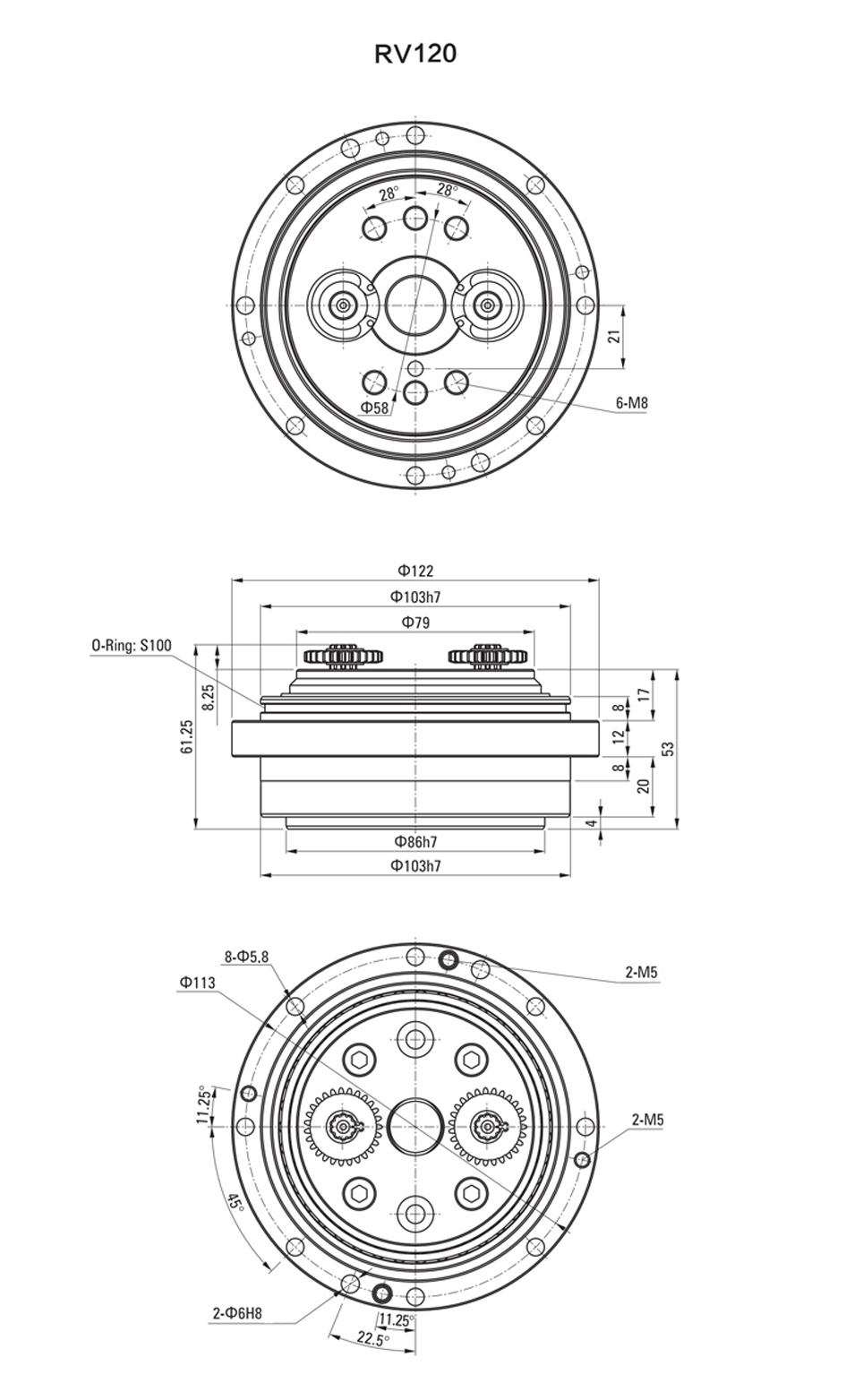
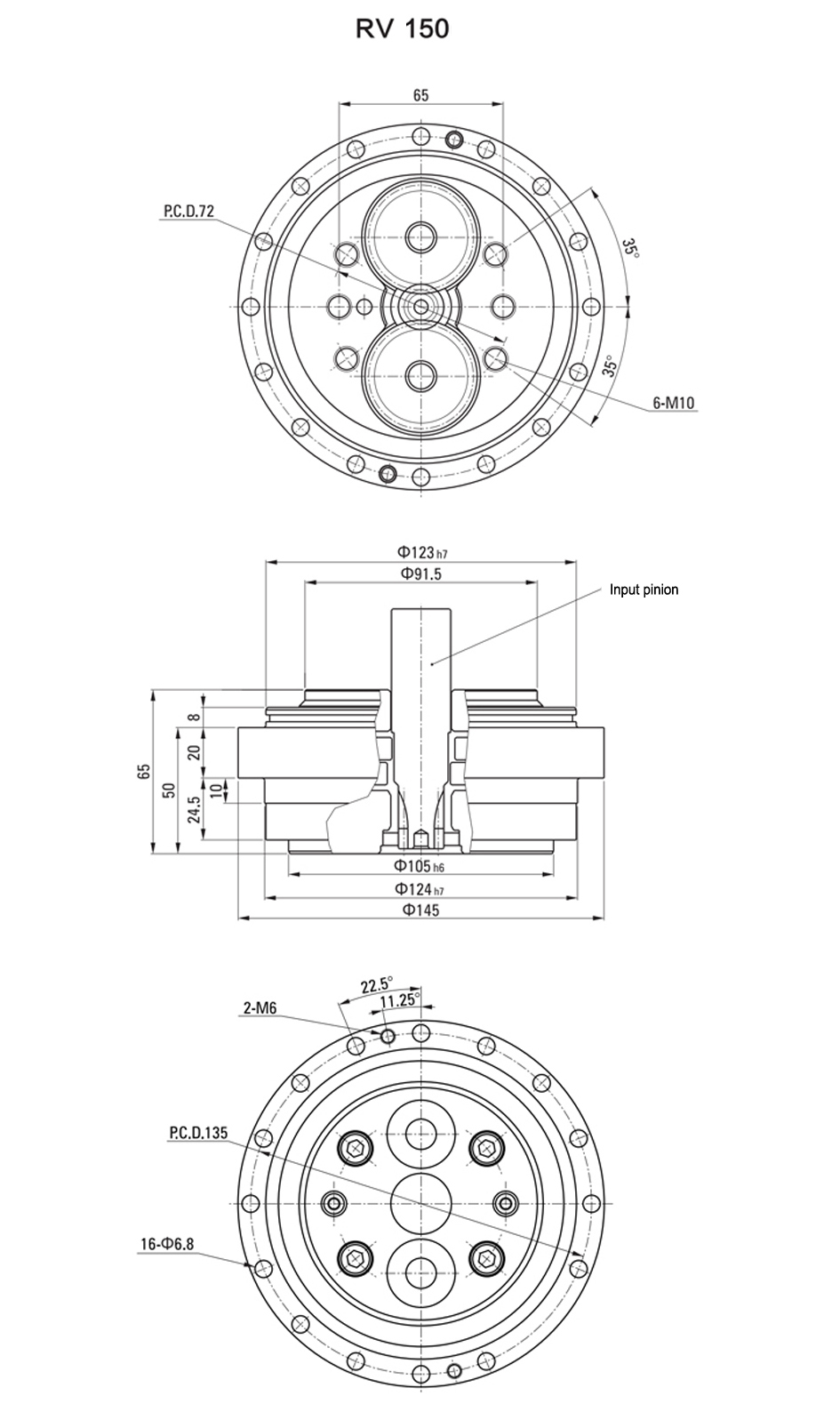
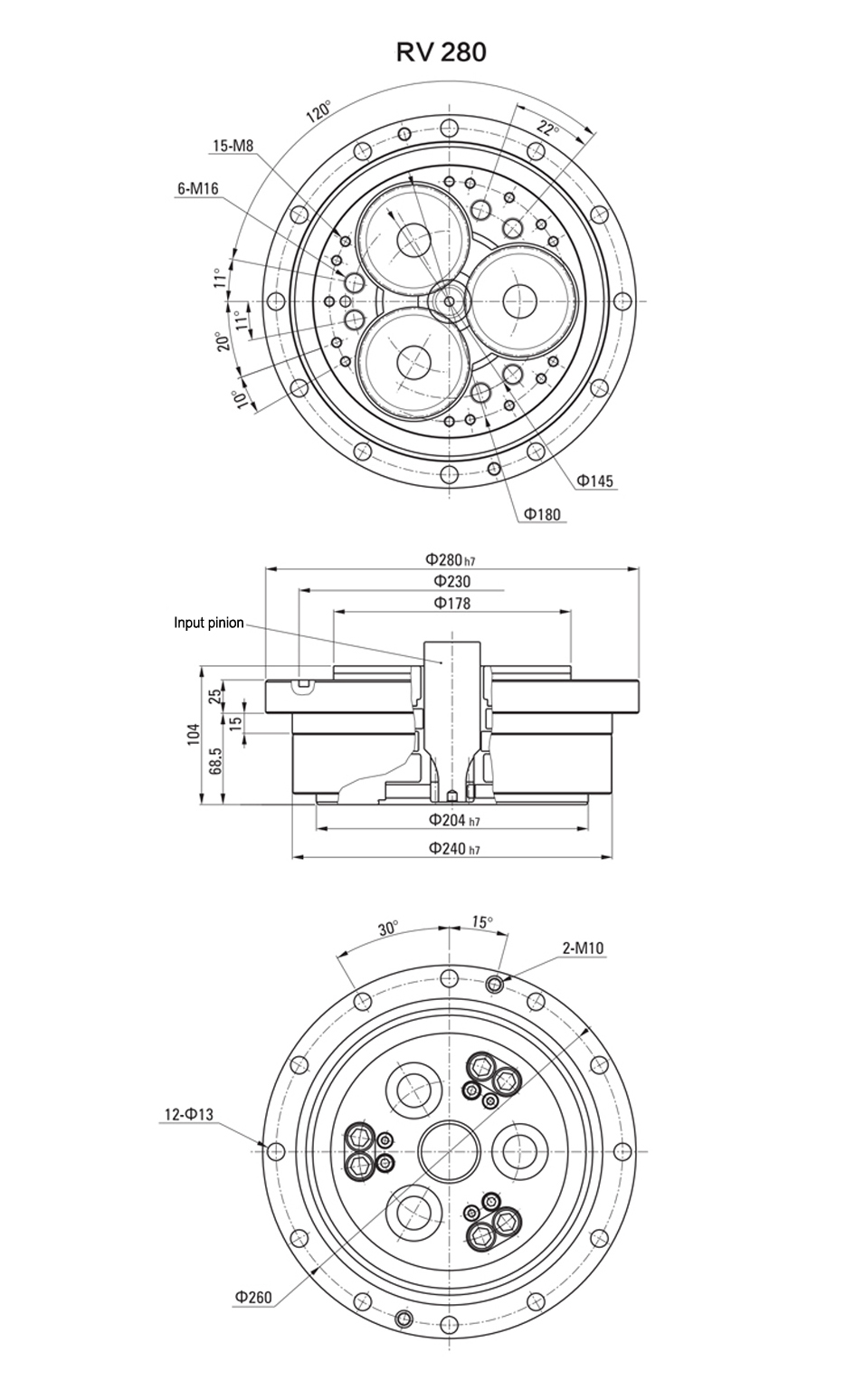
อาร์วี120 อาร์วี150 อาร์วี190 อาร์วี220 อาร์วี250 อาร์วี280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
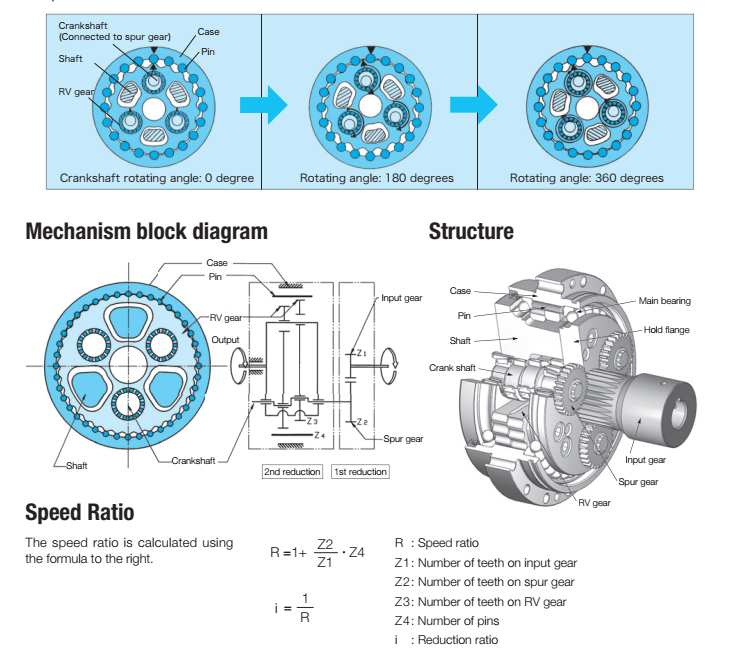
• การลดเกียร์เดือยขั้นที่ 1
เกียร์อินพุตประกอบและหมุนเฟืองเดือยที่ต่อกับเพลาข้อเหวี่ยง สามารถระบุอัตราทดเกียร์โดยรวมได้หลายอัตราโดยการเลือกอัตราทดขั้นแรกต่างๆ
ระยะที่ 2 การลดเกียร์แบบ Epicyclic
• เพลาข้อเหวี่ยงที่ขับเคลื่อนด้วยเฟืองเดือยทำให้เกิดการเคลื่อนที่เยื้องศูนย์ของเฟืองเอพิไซคลิกสองตัวที่เรียกว่าเฟือง RV ซึ่งจะชดเชยกัน 180 องศาจากกันเพื่อให้การรับน้ำหนักที่สมดุล
• การเคลื่อนที่ที่ผิดปกติของเฟือง RV ทำให้เกิดการปะทะกันของฟันเฟืองรูปไซโคลลอยด์โดยมีหมุดรูปทรงกระบอกอยู่รอบขอบด้านในของตัวเรือน
• ในระหว่างการหมุนเพลาข้อเหวี่ยงหนึ่งครั้ง ฟันของเฟือง RV จะเคลื่อนระยะห่างของหมุดหนึ่งอันไปในทิศทางตรงกันข้ามกับข้อเหวี่ยงที่กำลังหมุน การเคลื่อนที่ของเฟือง RV ทำให้ฟันยังคงสัมผัสกับหมุดอย่างใกล้ชิด และฟันหลายซี่จะรับภาระร่วมกันพร้อมกัน
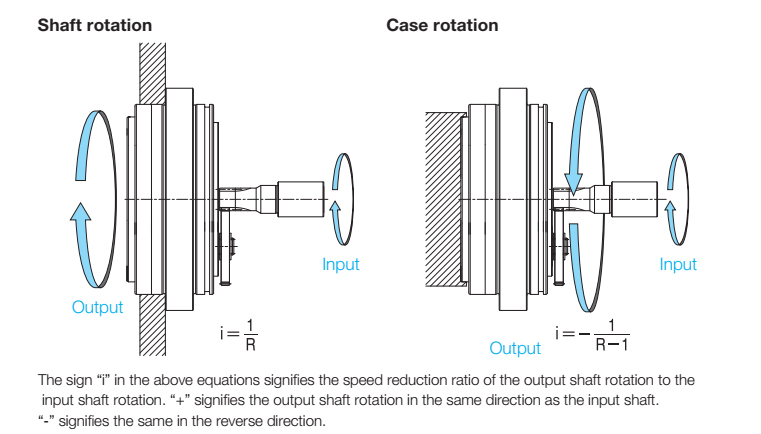
• เอาต์พุตอาจเป็นได้ทั้งเพลาหรือตัวเครื่อง หากเคสได้รับการแก้ไข เพลาจะเป็นเอาท์พุต หากเพลาได้รับการแก้ไข เคสจะเป็นเอาท์พุต
เกียร์ทั้งหมดถูกคาร์บูไรซ์ซึ่งมีภาระสูง เสียงเบา การสั่นสะเทือนต่ำ ความเฉื่อยต่ำ และอายุการใช้งานยาวนาน มีความแม่นยำสูงสำหรับการเบี่ยงเบนต่ำในทิศทางการหมุน ต้นทุนต่ำสำหรับทุกการใช้งาน
ทิศทางการหมุนและอัตราทดเกียร์
อัตราส่วน: 41 81 102.17 102.81 107.66 125.21 126 137 156 164.07 141 145.61 161 201 171 75 93 117 139 162 185 81 105 123 144 159 19 2.75 105 118 142.44 159 183 203.52
รหัสสินค้า
อัตราส่วนความเร็วโดยรวม i (ของระยะการลดขั้นที่หนึ่งและครั้งที่สอง) จะแตกต่างกันระหว่างการหมุนเพลาและการหมุนของโครง และสามารถคำนวณได้จากอัตราส่วนความเร็ว