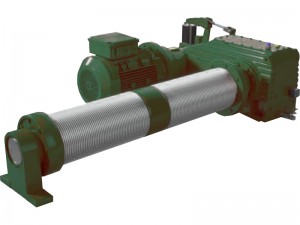
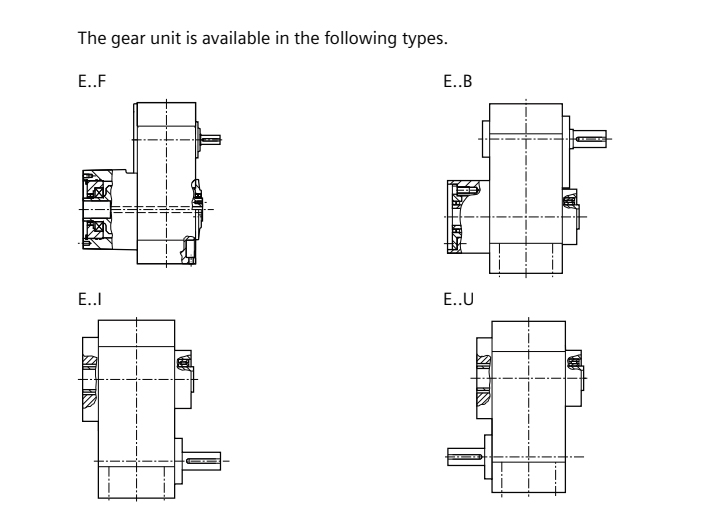
Агрегатхои фишанги экструдери яквинта
Андозаҳо:
E2U E3U E4U E5U E6U E7U E8U E9U E10U E11U E12U
E2F E3F E4F E5F E6F E7F E8F E9F E10F E11F E12F
E2I E3I E4I E5I E6I E7I E8I E9I E10I E11I E12I
E2B E3B E4B E5B E6B E7B E8B E9B E10B E11B E12B
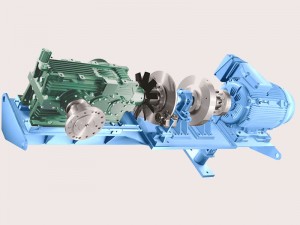
Тарҳрезии компакт
Партоби садои паст
Баландтарин қувваҳои меҳвари имконпазир аз ҳисоби подшипникҳои борпечӣ, ки дар пеши редуктор ҷойгир шудаанд
Эътимоднокии баландтарини корӣ аз ҳисоби подшипник дар камераи равғани агрегати редуктор
Коҳиш додани вақти интиқол
ВИДДАИ ЯККА – БИСЁР БАРОМАД
Дар истехсоли каучук ва пластмасса хелхои зиёди материалхо дакики хеле баланди машинахои коркардро талаб мекунанд. Танҳо дар он сурат метавон интизориҳои зиёди муштариёнро нисбат ба маҳсулоти ниҳоӣ қонеъ кард. Қувваҳои баланди меҳвар аз раванди экструзия бояд ҷаббида шаванд. Агрегатҳои фишангҳои экструдерии ягонаи винти мо асосан дар корхонаҳо барои ташаккули пластикӣ истифода мешаванд ва бо эътимоднокии баланди амалиётӣ ва мӯҳлати кӯтоҳи интиқол хосанд. Силсилаи стандартӣ аз агрегатҳои фишангҳои 2 ва 3-марҳилаи спиралӣ ё кирмдор иборат аст, ки ё подшипникҳои ҳамгирошуда ё подшипникҳои такякунандае, ки дар пеши редуктор ҷойгир шудаанд. Моменти баромад аз 6,300 то 173,000 Нм имконпазир аст.
Барномаҳо
Доираи васеи барномаҳо, масалан, барои:
Резин барои тасмаҳои конвейер
Шинаҳои автомобилӣ
Плёнка/плёнкаҳои пластикӣ, масалан плёнкаи бастабандӣ, халтаҳои интиқолдиҳанда, брезентҳо барои киштзорҳо
Плёнка, халтахои нигохдории хурокворй
Бастабандӣ (Tetra-Pak)
Плитаҳои гармидиҳӣ (полистирол)
Парчаҳои роторӣ барои турбинаҳои бодӣ
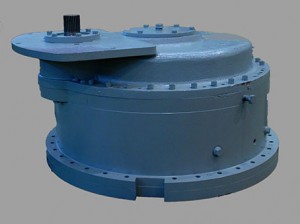
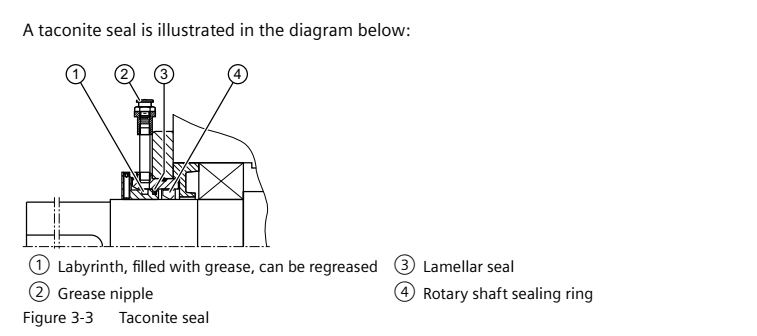
Мӯҳри таконит
Мӯҳри таконит маҷмӯи ду унсури мӯҳр аст:
• Ҳалқаи мӯҳркунандаи чоҳи гардишкунанда барои пешгирӣ аз хуруҷи равғани молиданӣ
• Мӯҳри хоки бо равған пуршуда (аз лабиринт ва мӯҳри ламеллярӣ) барои имкон додани кори
агрегати редуктор дар мухити нихоят чанголуд
Мӯҳри таконит барои истифода дар муҳити чанголуд беҳтарин аст
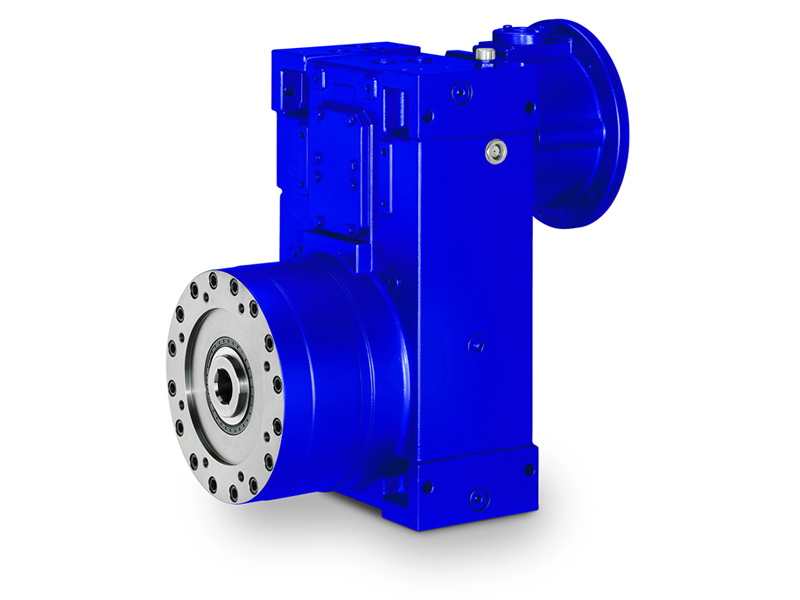
Системаи мониторинги сатҳи нафт
Вобаста ба мушаххасоти фармоиш, агрегати фишанг метавонад бо системаи назорати сатҳи равған дар асоси монитор, тугмаи сатҳ ё тугмаи лимити сатҳи пуркунӣ муҷаҳҳаз карда шавад. Системаи назорати сатҳи равған барои санҷидани сатҳи равған дар ҳолати қатъ шудани редуктор пеш аз оғози он пешбинӣ шудааст.
Мониторинги сарбории аксиалӣ
Вобаста ба мушаххасоти фармоиш, агрегати фишангро бо системаи назорати сарбории меҳварӣ муҷаҳҳаз кардан мумкин аст. Сарбории меҳварӣ аз чоҳи кирм тавассути ҳуҷайраи боркаши дарунсохт назорат карда мешавад. Инро ба воҳиди баҳодиҳии аз ҷониби муштарӣ пешниҳодшуда пайваст кунед.
Мониторинги подшипник (мониторинги ларзиш)
Вобаста ба мушаххасоти фармоиш, агрегати фишанг метавонад бо сенсорҳои ларзиш,
сенсорҳо ё бо риштаҳо барои пайваст кардани таҷҳизот барои назорат кардани подшипникҳо ё фишанги чархзананда. Шумо маълумотро дар бораи тарҳрезии системаи мониторинги подшипникҳо дар варақаи иттилоотии алоҳида дар ҳуҷҷатҳои мукаммали редуктор пайдо мекунед.
Ба сифати алтернатива пистонхои ченкуниро ба редукторхо васл кардан мумкин аст.