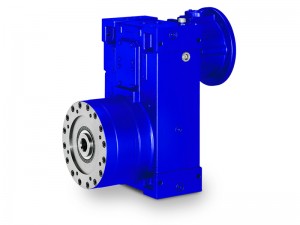
robot presisjonsgir

Størrelser: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
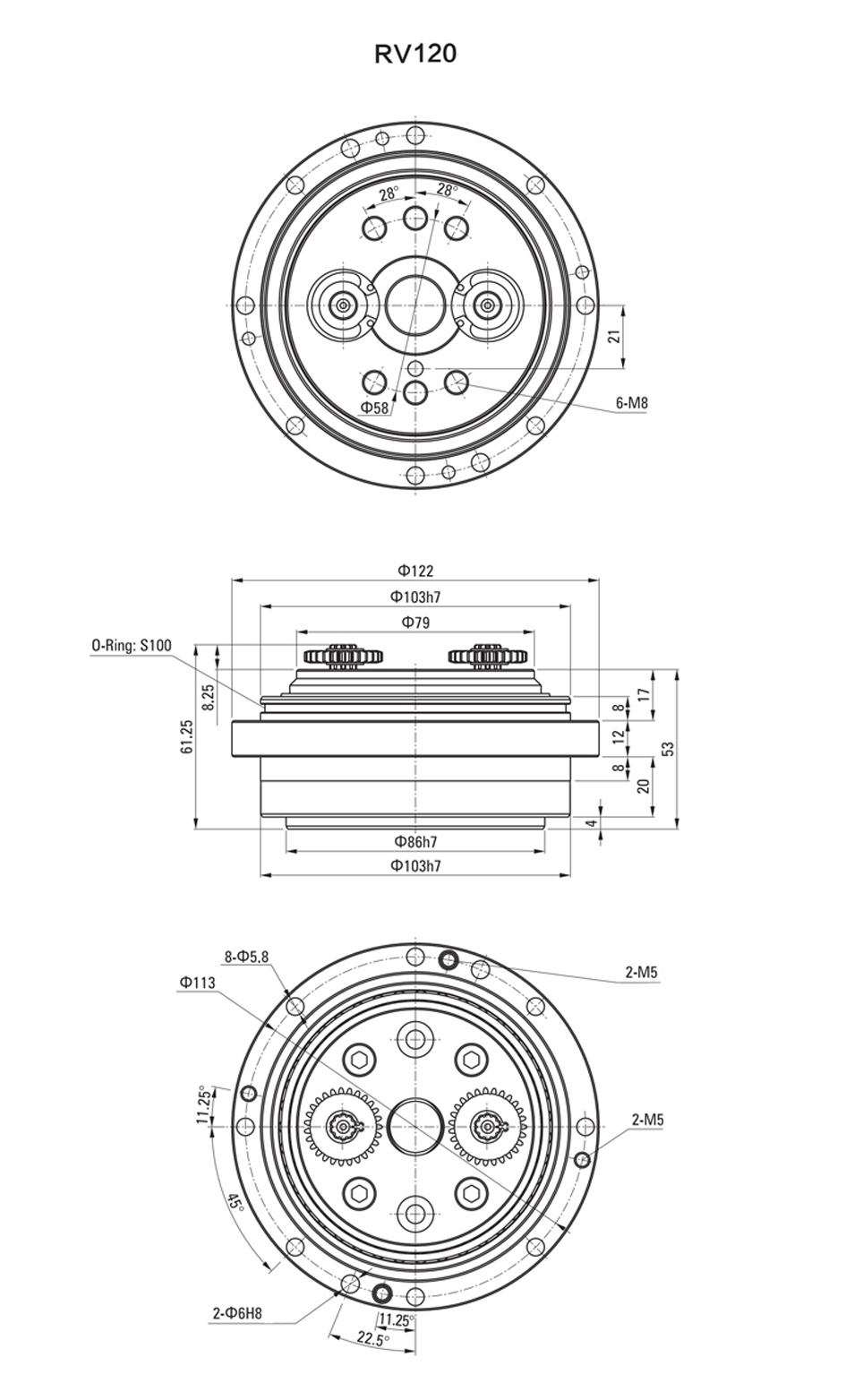
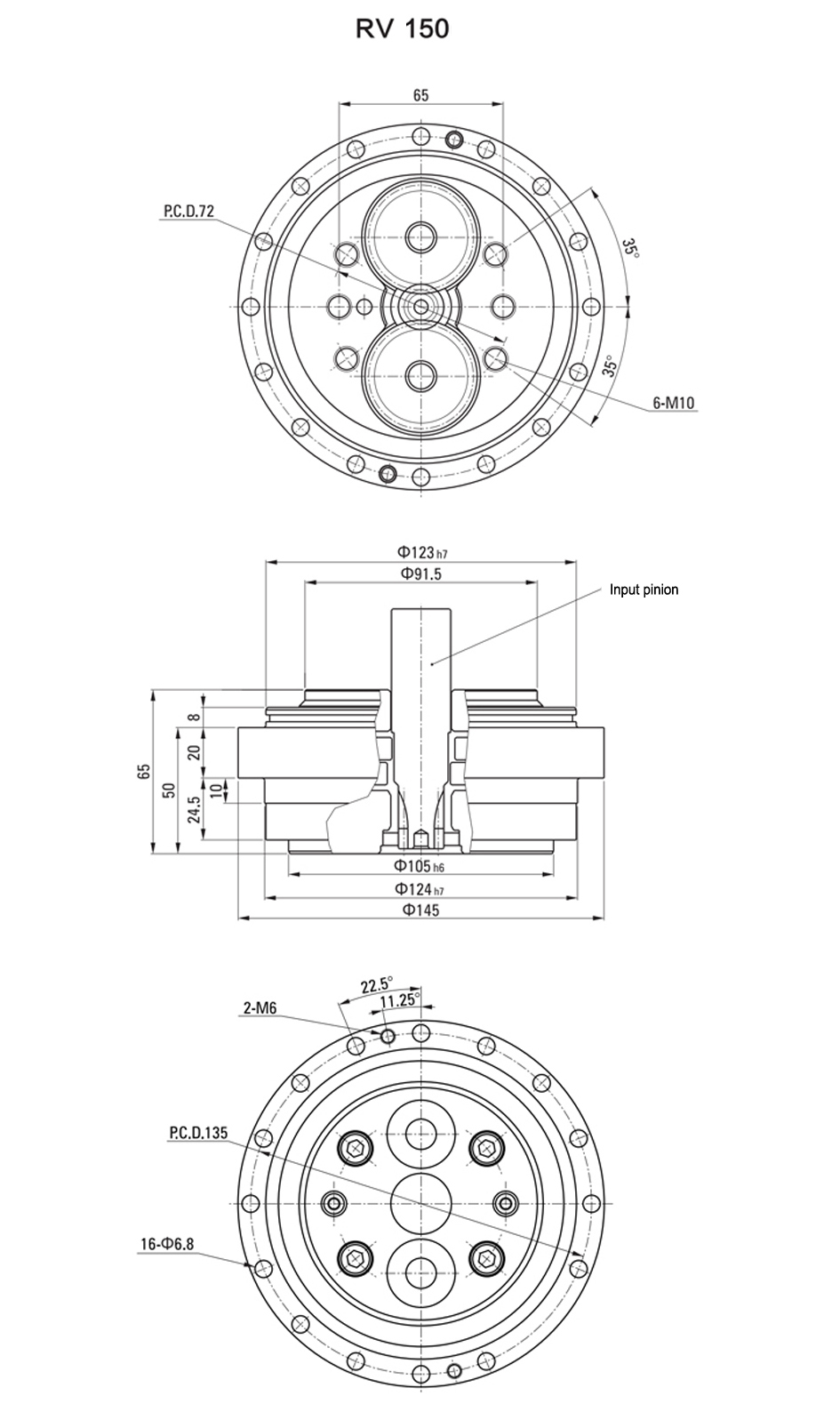
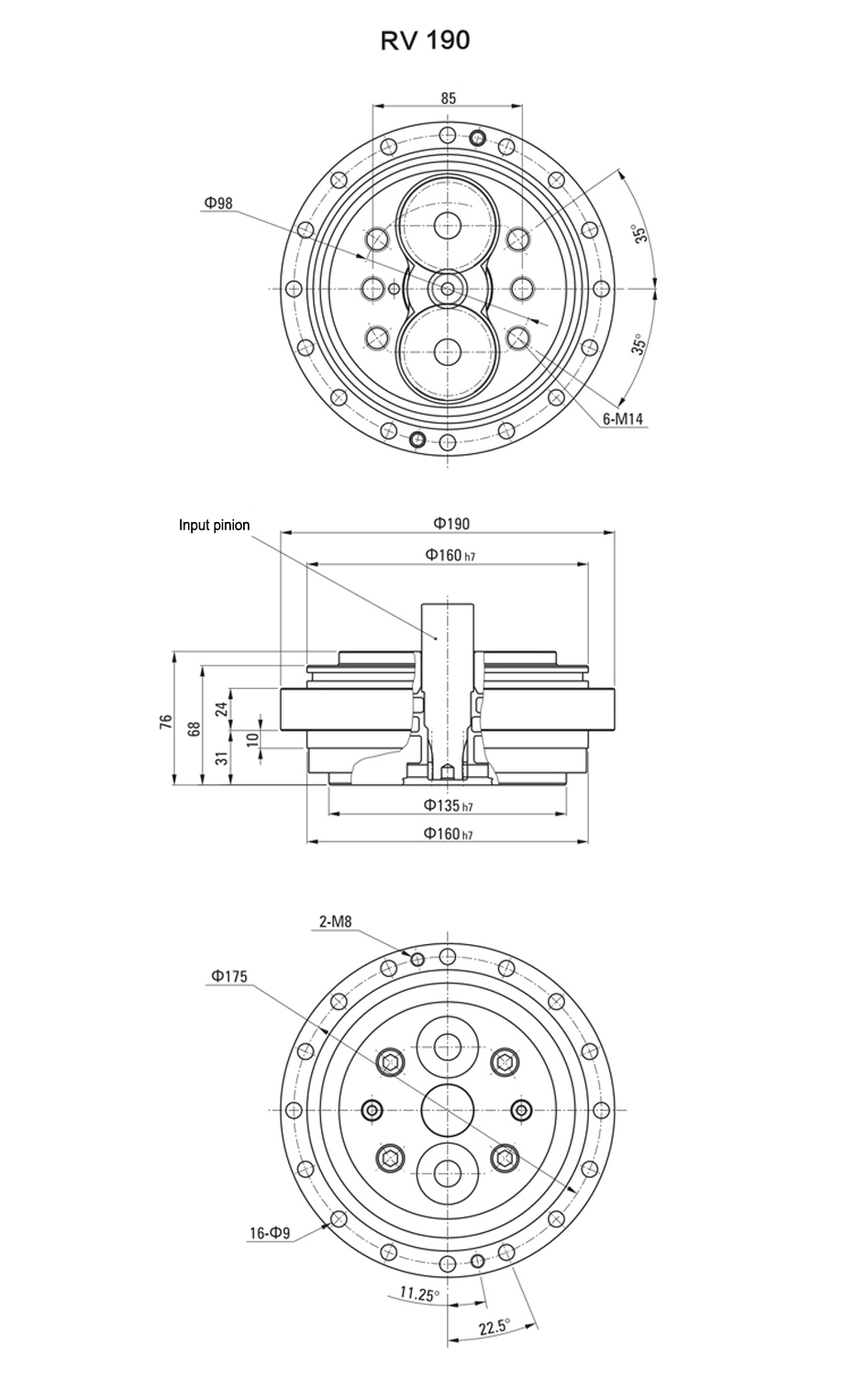
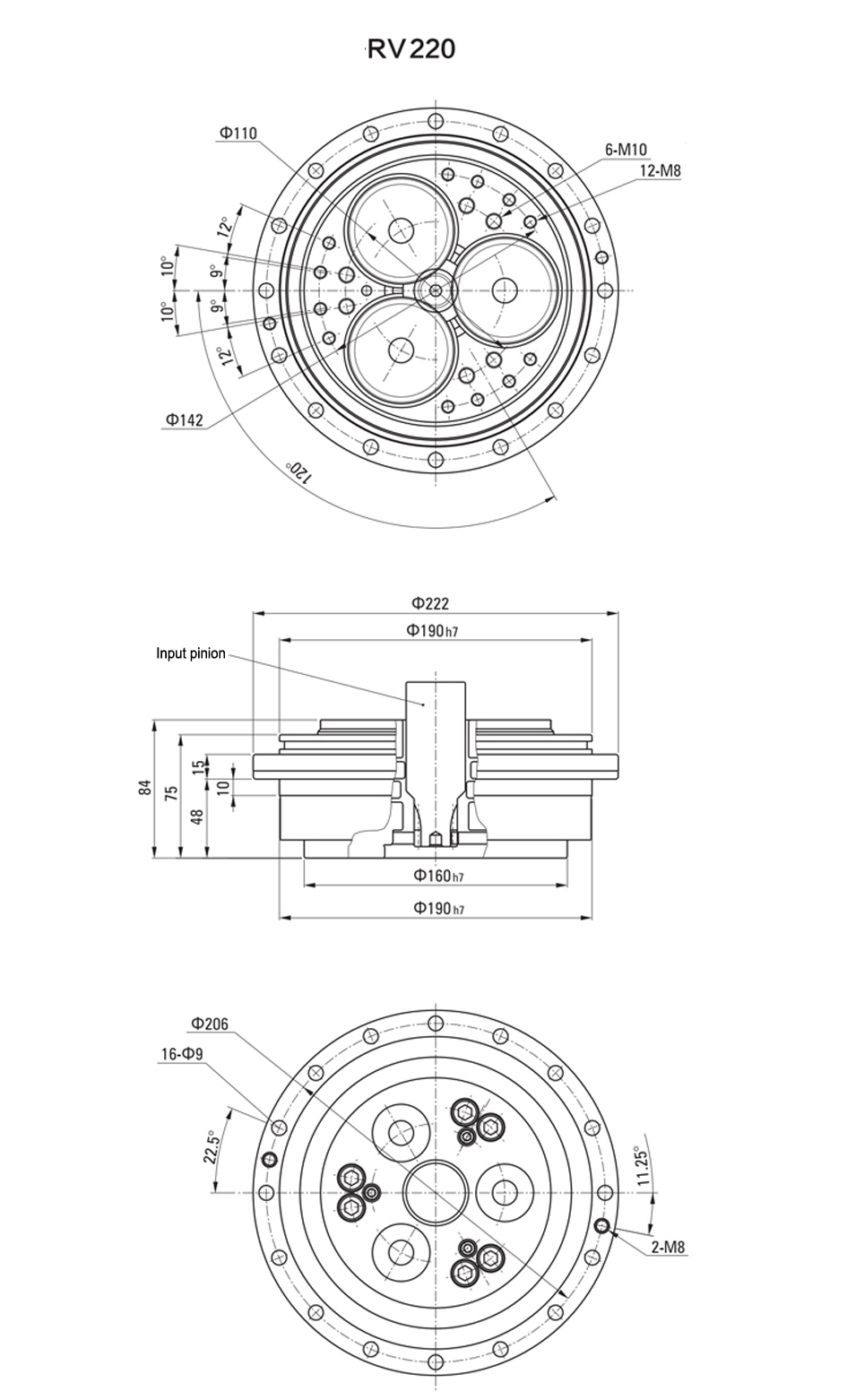
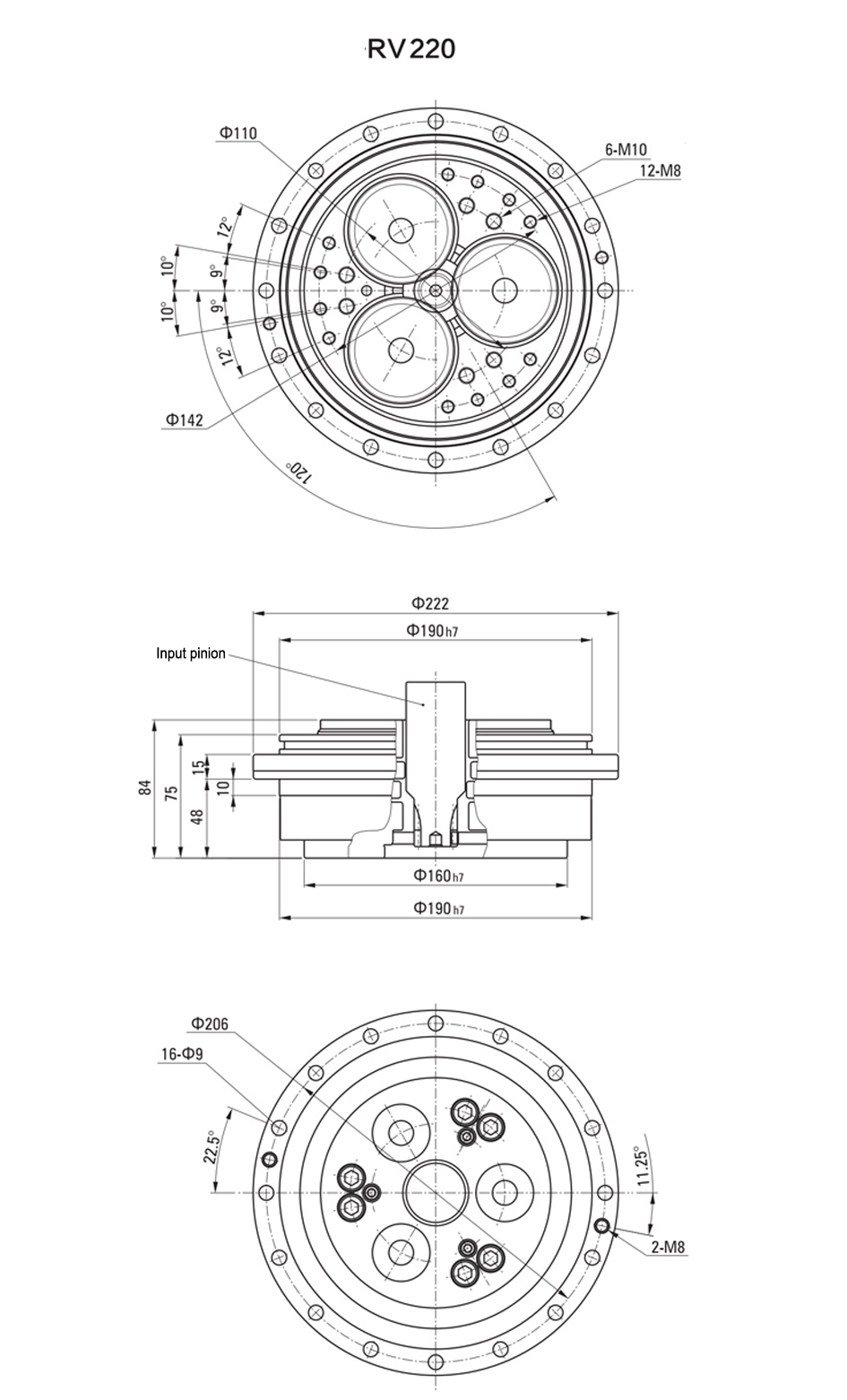
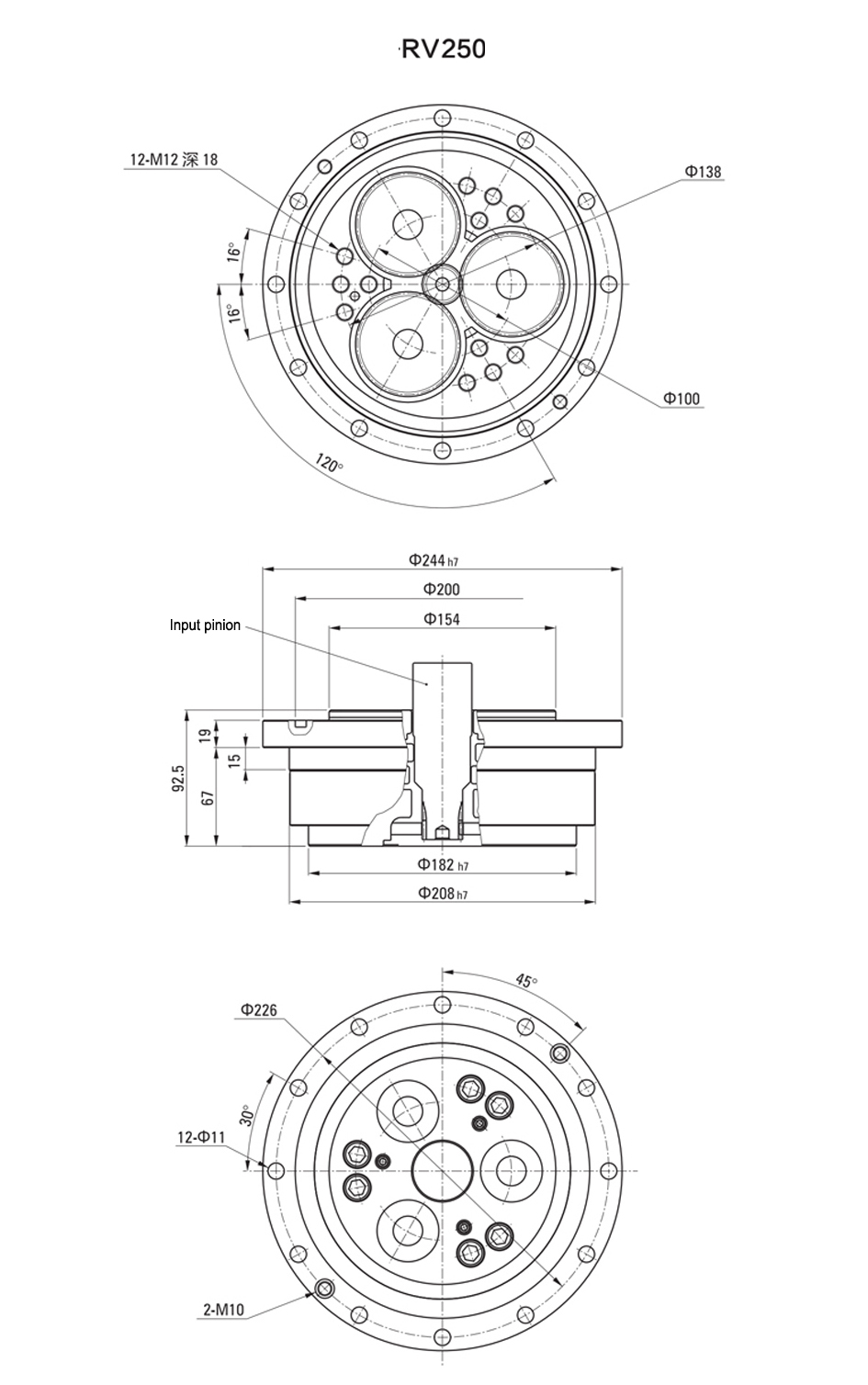
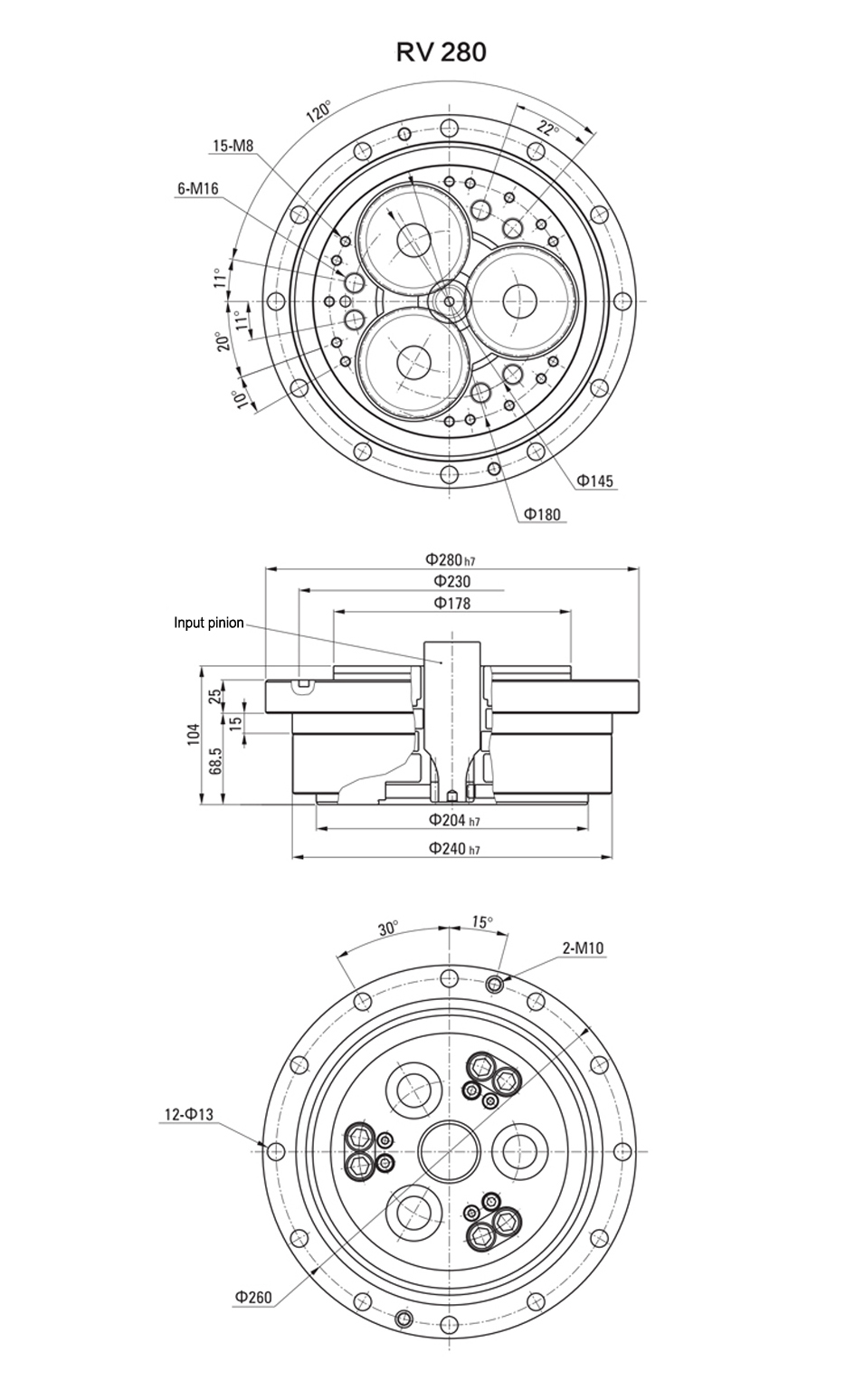
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
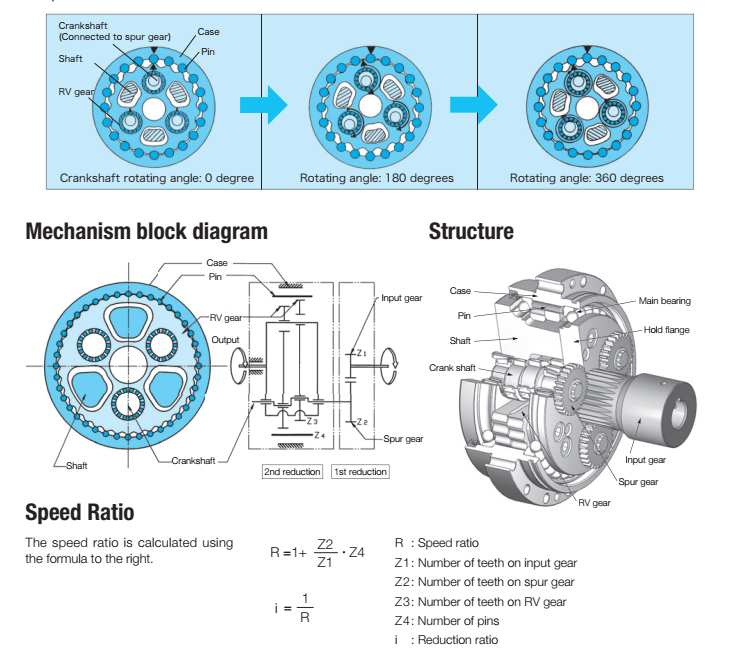
• 1. trinns sporreduksjon
Et inngangsgir går i inngrep med og roterer cylindriske tannhjul som er koblet til veivaksler. Flere overordnede girforhold kan gis ved å velge forskjellige første trinns utvekslinger.
2. trinn Episyklisk girreduksjon
• Veivaksler drevet av de sylindriske tannhjulene forårsaker en eksentrisk bevegelse av to episykliske gir kalt RV-gir som er forskjøvet 180 grader fra hverandre for å gi en balansert belastning.
• Den eksentriske bevegelsen til RV-girene forårsaker inngrep av de sykloideformede tannhjulstennene med sylindrisk formede pinner plassert rundt innerkanten av kassen.
• I løpet av én omdreining av veivakslene beveger tennene på RV-giret avstanden til en pinne i motsatt retning av de roterende veivene. Bevegelsen til RV-giret er slik at tennene forblir i nær kontakt med pinnene og flere tenner deler belastningen samtidig.
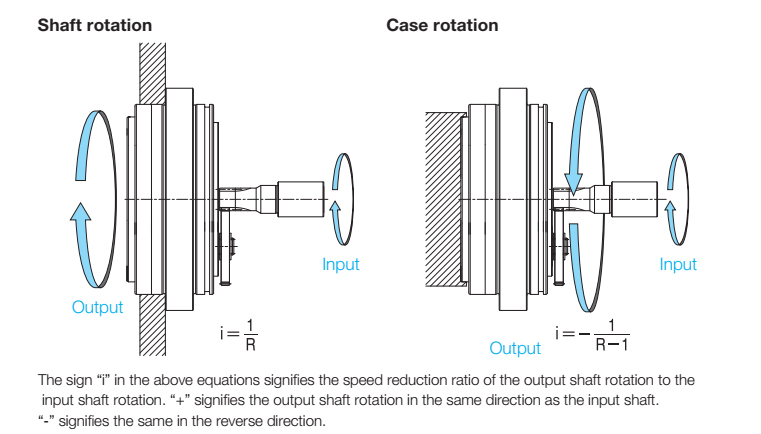
• Utgangen kan være enten akselen eller kassen. Hvis saken er fast, er akselen utgangen. Hvis akselen er fast, er saken utgangen.
Alle gir er forkullet med høy belastning, lav støy, lav vibrasjon, lav treghet og lang levetid, høy presisjon for lavt avvik i rotasjonsretningen. Lav kostnad for alle applikasjoner.
Rotasjonsretning og girforhold
Rasjon: 41 81 102,17 102,81 107,66 125,21 126 137 156 164,07 141 145,61 161 201 171 75 93 117 139 51 51 41 51 16 2,75 105 118 142,44 159 183 203,52
Produktkode
Det totale hastighetsforholdet i (av det første og andre reduksjonstrinn) vil variere mellom akselrotasjon og husrotasjon, og kan beregnes ut fra hastighetsforholdet.