unità tal-irkaptu ta 'preċiżjoni robot

Daqsijiet: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
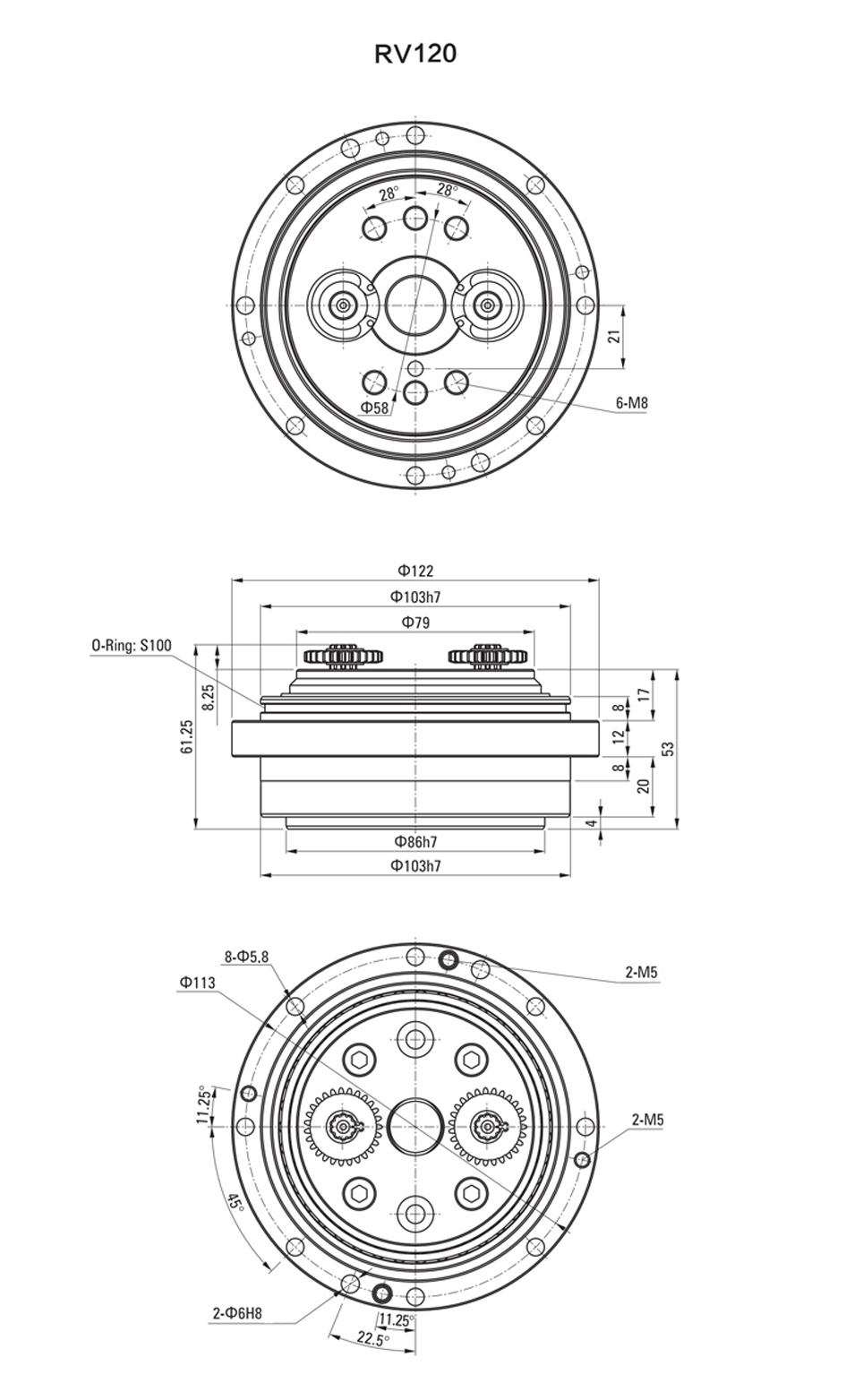
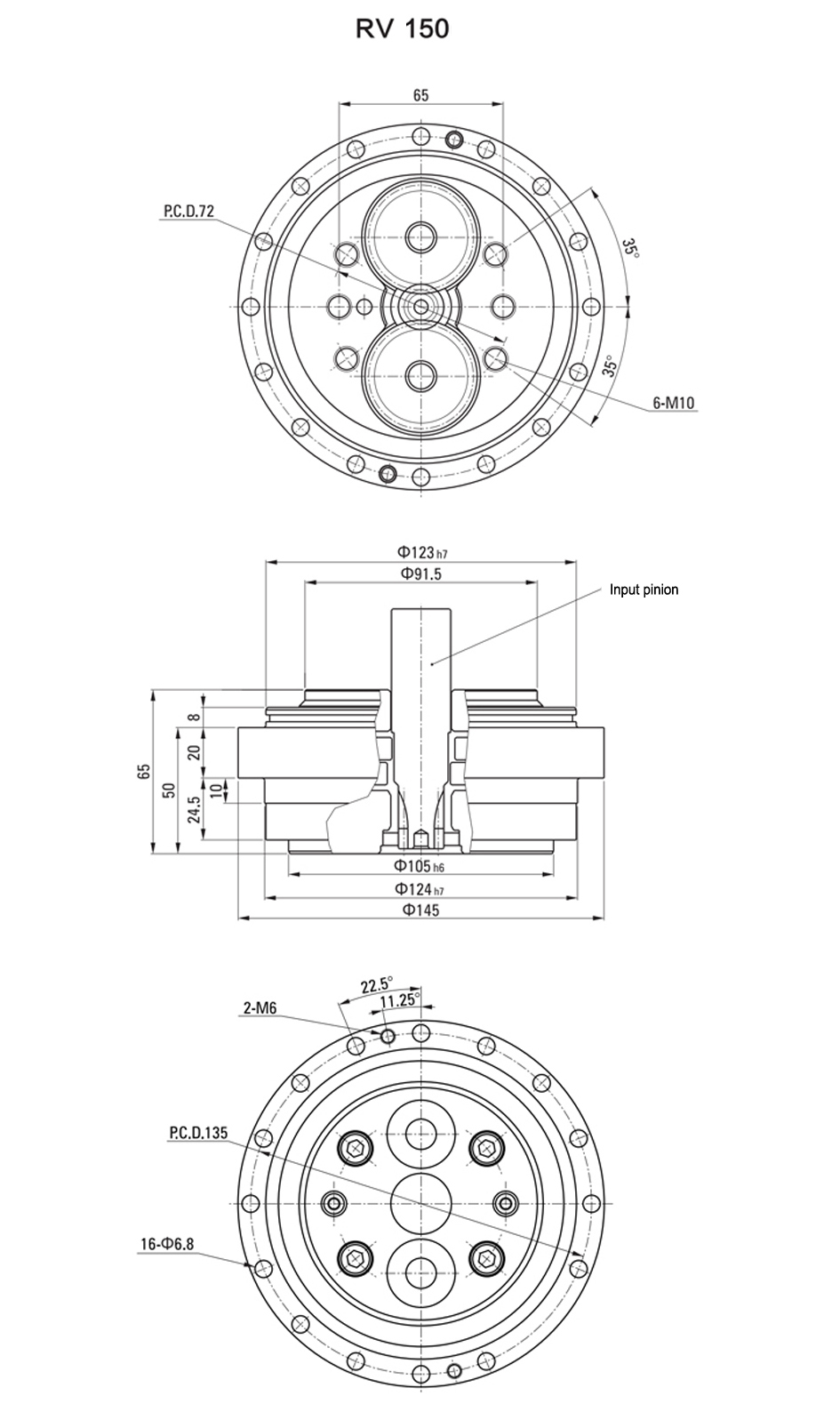
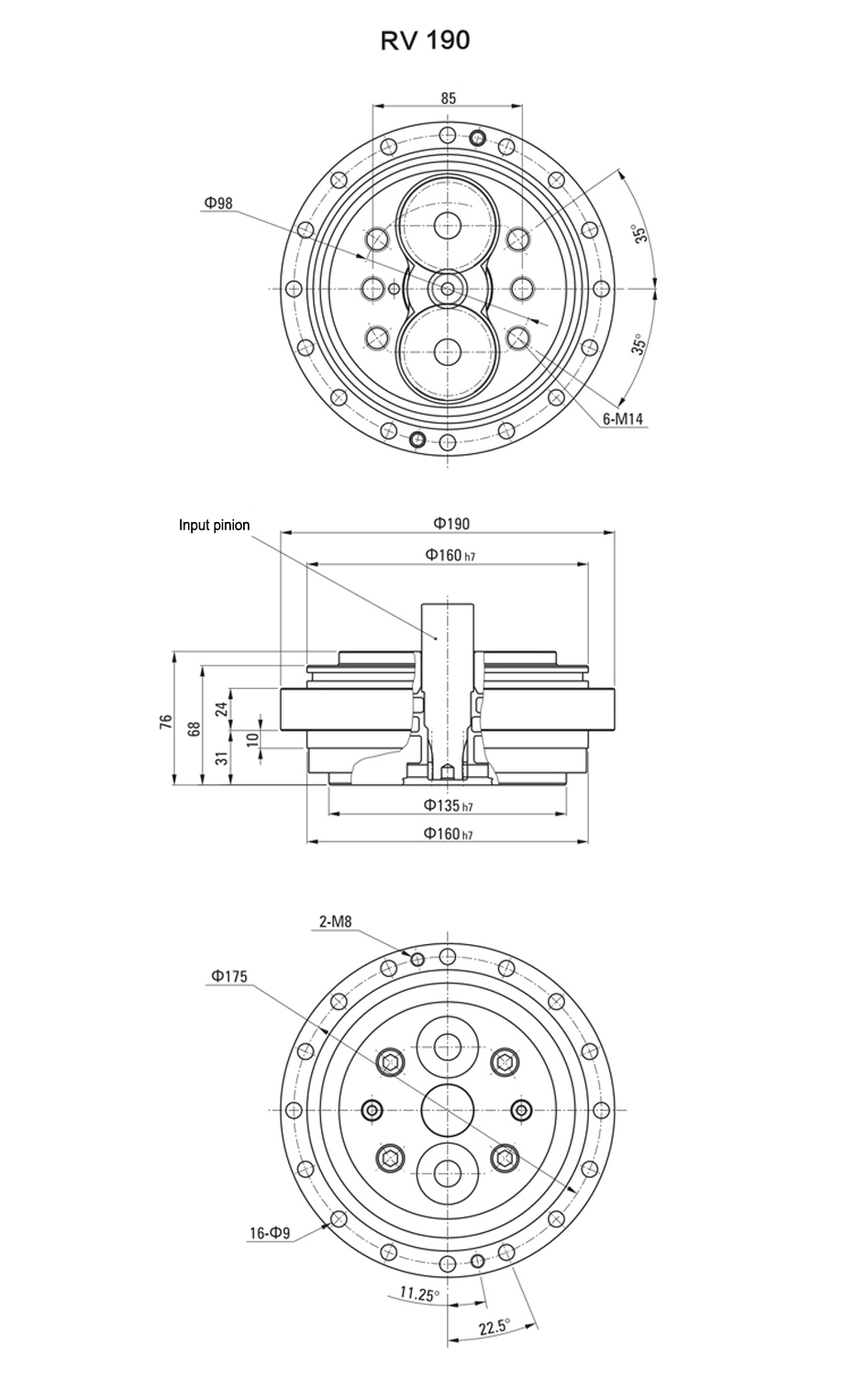
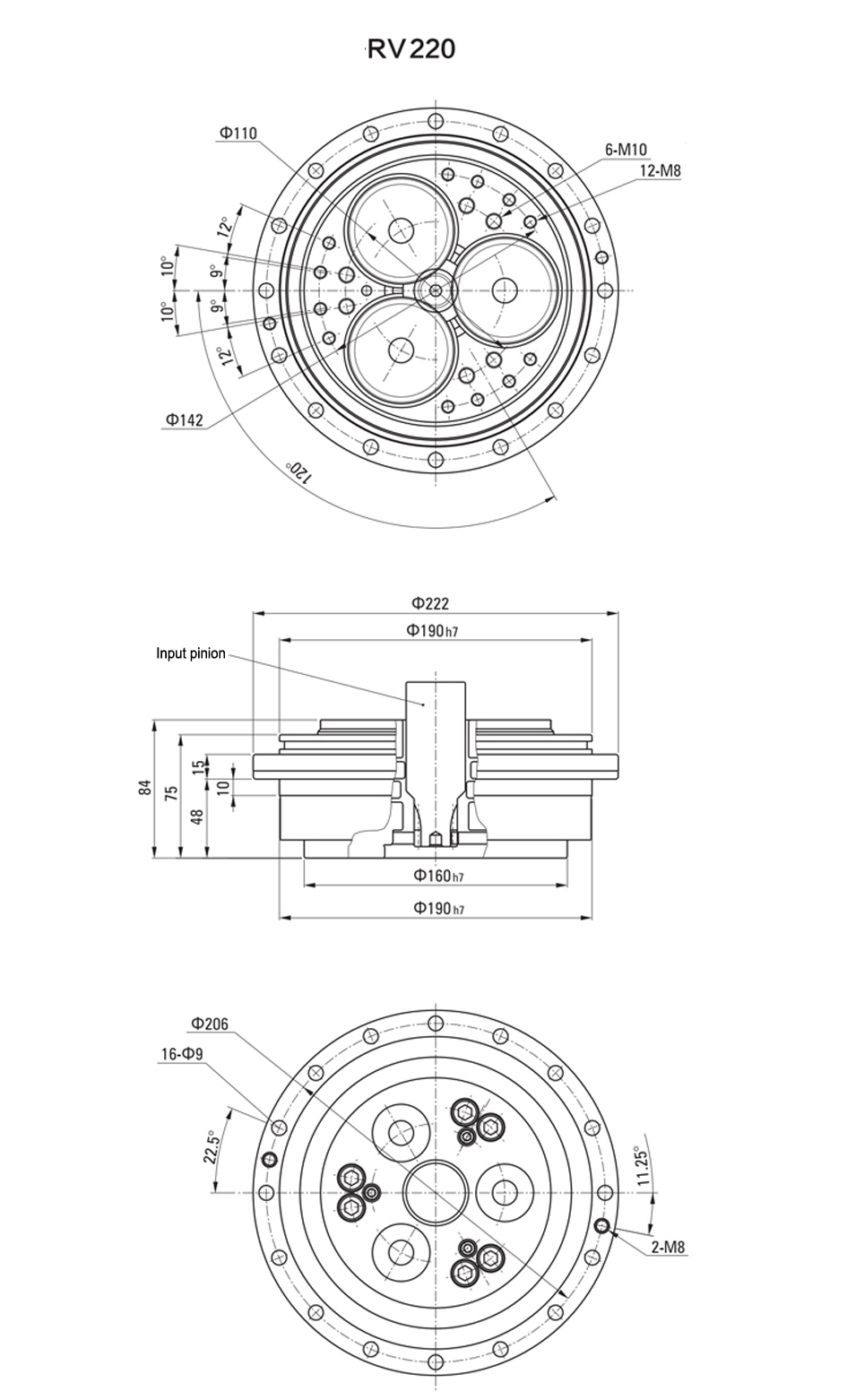
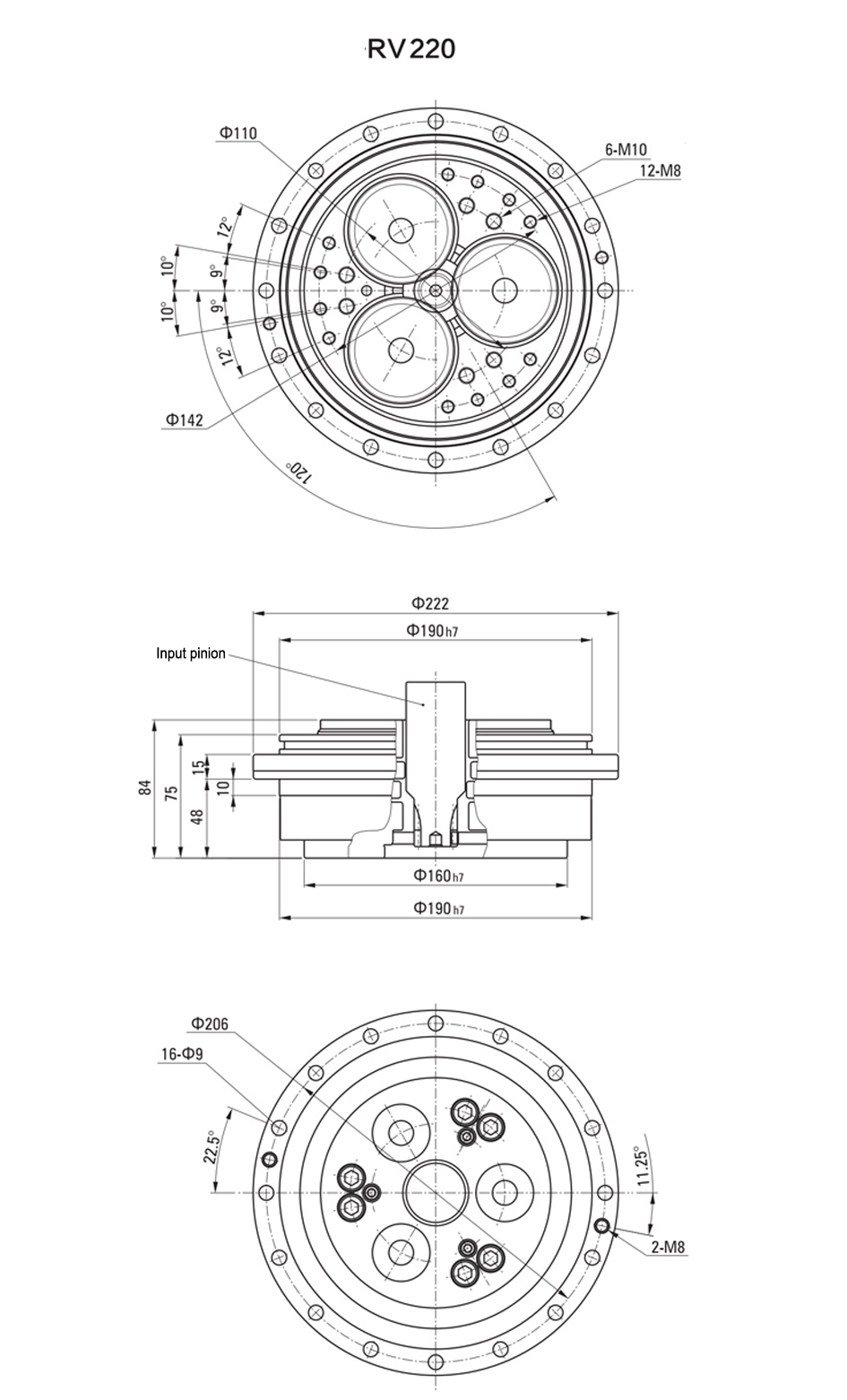
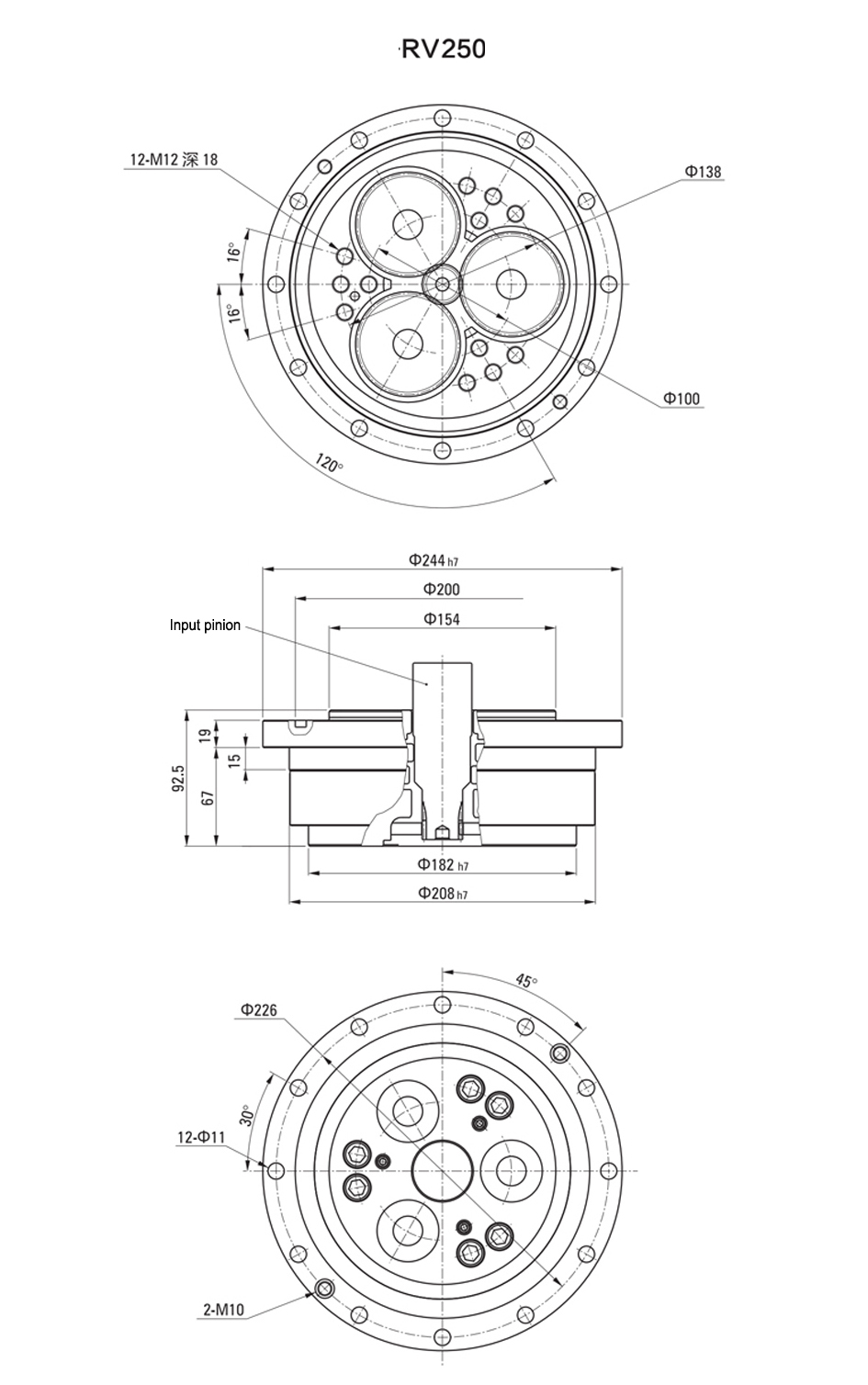
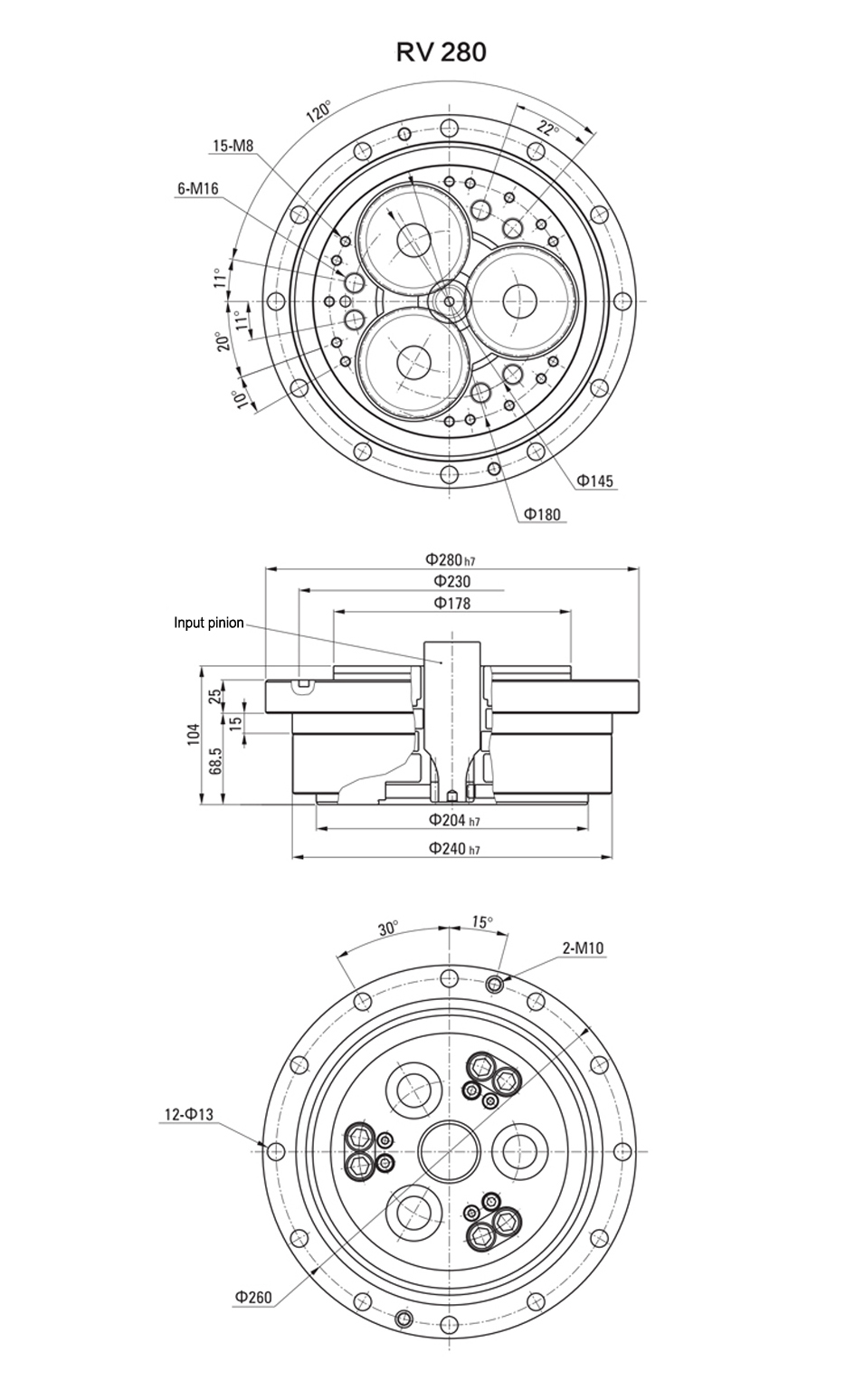
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
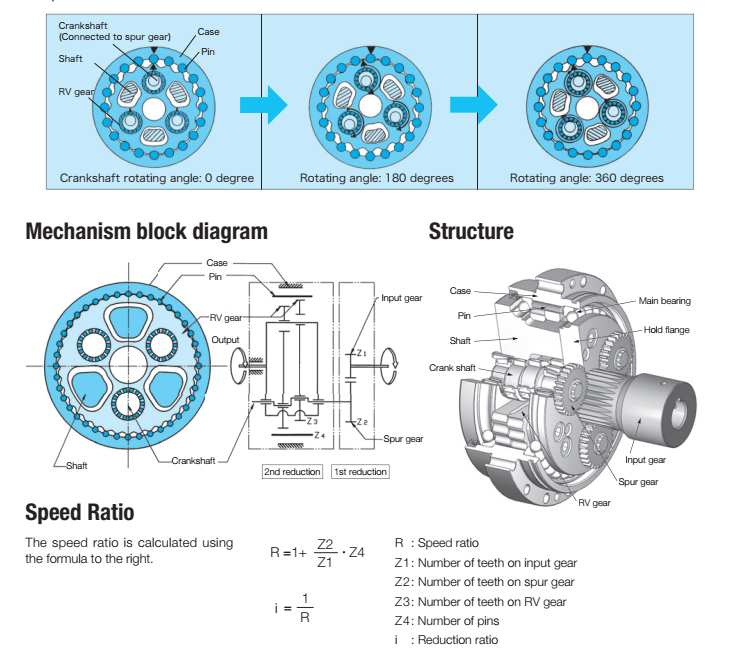
• L-1 stadju Spur gear tnaqqis
Irkaptu tal-input jidħol ma' u jdur gerijiet spur li huma akkoppjati mal-krankxafts. Jistgħu jiġu pprovduti diversi proporzjonijiet ġenerali tal-ger billi jintgħażlu diversi proporzjonijiet tal-ewwel stadju.
It-2 stadju tat-tnaqqis tal-ger epiċikliku
• Il-krankxafts misjuqa mill-gerijiet spur jikkawżaw moviment eċċentriku ta 'żewġ gerijiet epiċikliċi msejħa gerijiet RV li huma kkumpensati 180 grad minn xulxin biex jipprovdu tagħbija bilanċjata.
• Il-moviment eċċentriku tal-gerijiet RV jikkawża l-ingaġġ tas-snien tal-irkaptu b'forma ċiklojdali b'labar ta 'forma ċilindrika li jinsabu madwar it-tarf ta' ġewwa tal-kaxxa.
• Fil-kors ta 'rivoluzzjoni waħda tal-krankxafts is-snien tal-ger RV jimxu d-distanza ta' pin wieħed fid-direzzjoni opposta tal-krankijiet li jduru. Il-moviment tal-irkaptu RV huwa tali li s-snien jibqgħu f'kuntatt mill-qrib mal-brilli u snien multipli jaqsmu t-tagħbija simultanjament.
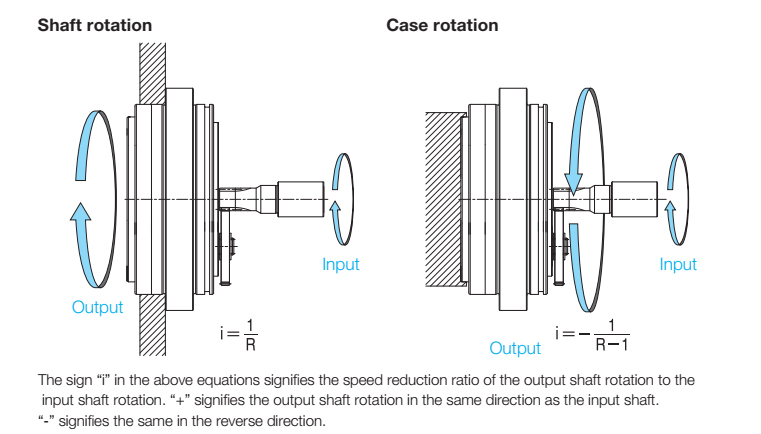
• L-output jista 'jkun jew ix-xaft jew il-każ. Jekk il-każ huwa ffissat, ix-xaft huwa l-output. Jekk ix-xaft huwa ffissat, il-każ huwa l-output.
Il-gerijiet kollha huma karburizzati b'tagħbija għolja, ħsejjes baxxi, vibrazzjoni baxxa, inerzja baxxa u ħajja twila, preċiżjoni għolja għal devjazzjoni baxxa f'direzzjoni rotatorja. Spiża baxxa għall-applikazzjoni kollha.
Direzzjoni tar-rotazzjoni u proporzjon tal-ger
Razzjoni: 41 81 102.17 102.81 107.66 125.21 126 137 156 164.07 141 145.61 161 201 171 75 93 117 139 51 164 164 164 2.75 105 118 142.44 159 183 203.52
Kodiċi tal-prodott
Il-proporzjon tal-veloċità ġenerali i (tal-Ewwel u t-Tieni stadji ta 'tnaqqis) se jvarja bejn ir-rotazzjoni tax-xaft u r-rotazzjoni tal-każ, u jista' jiġi kkalkulat mill-proporzjon tal-veloċità.