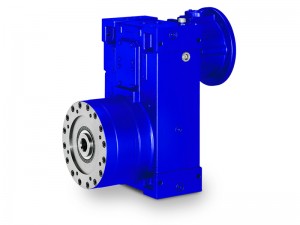
yekîneya pêlavê ya rastîn a robot

Mezinahî: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
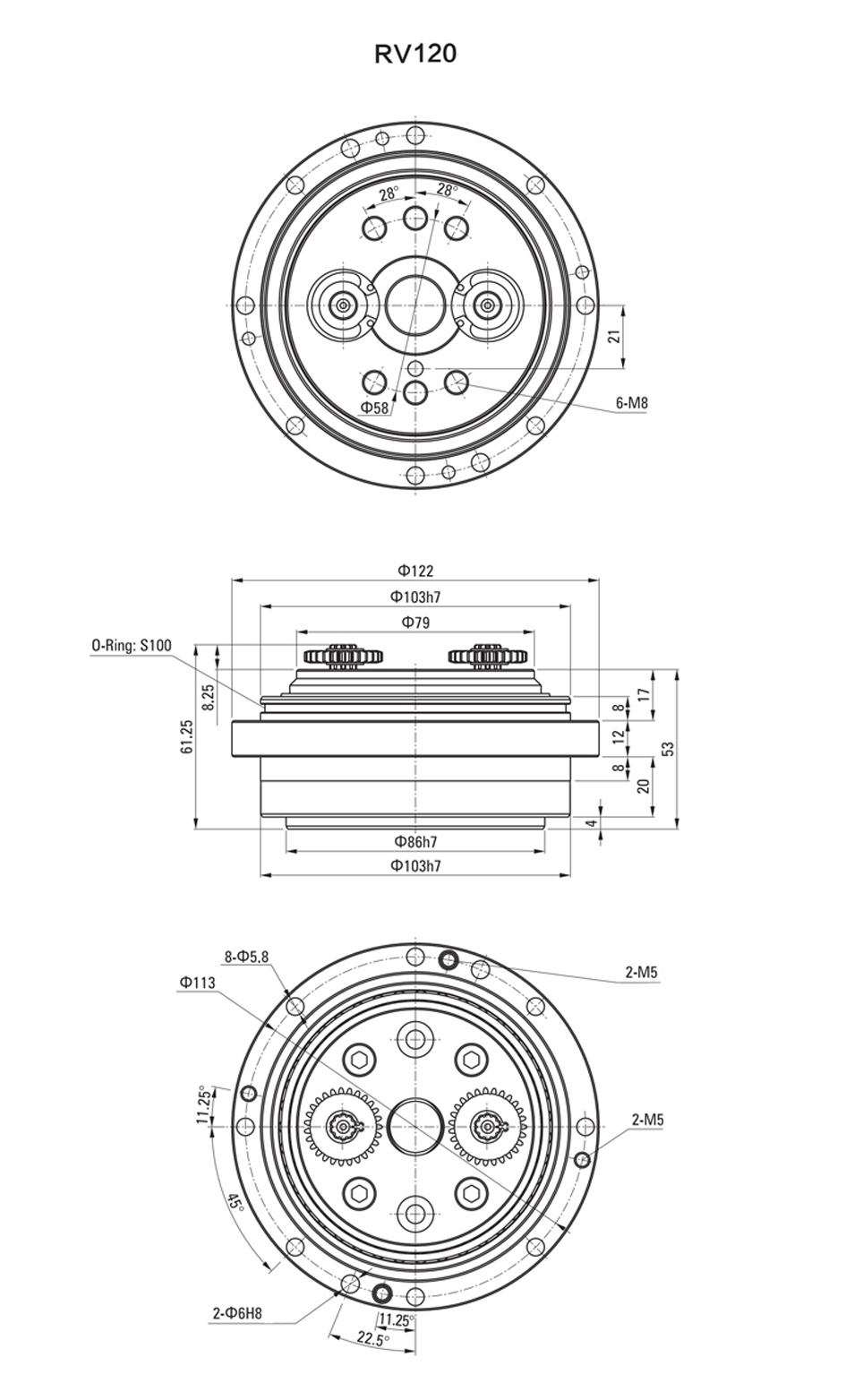
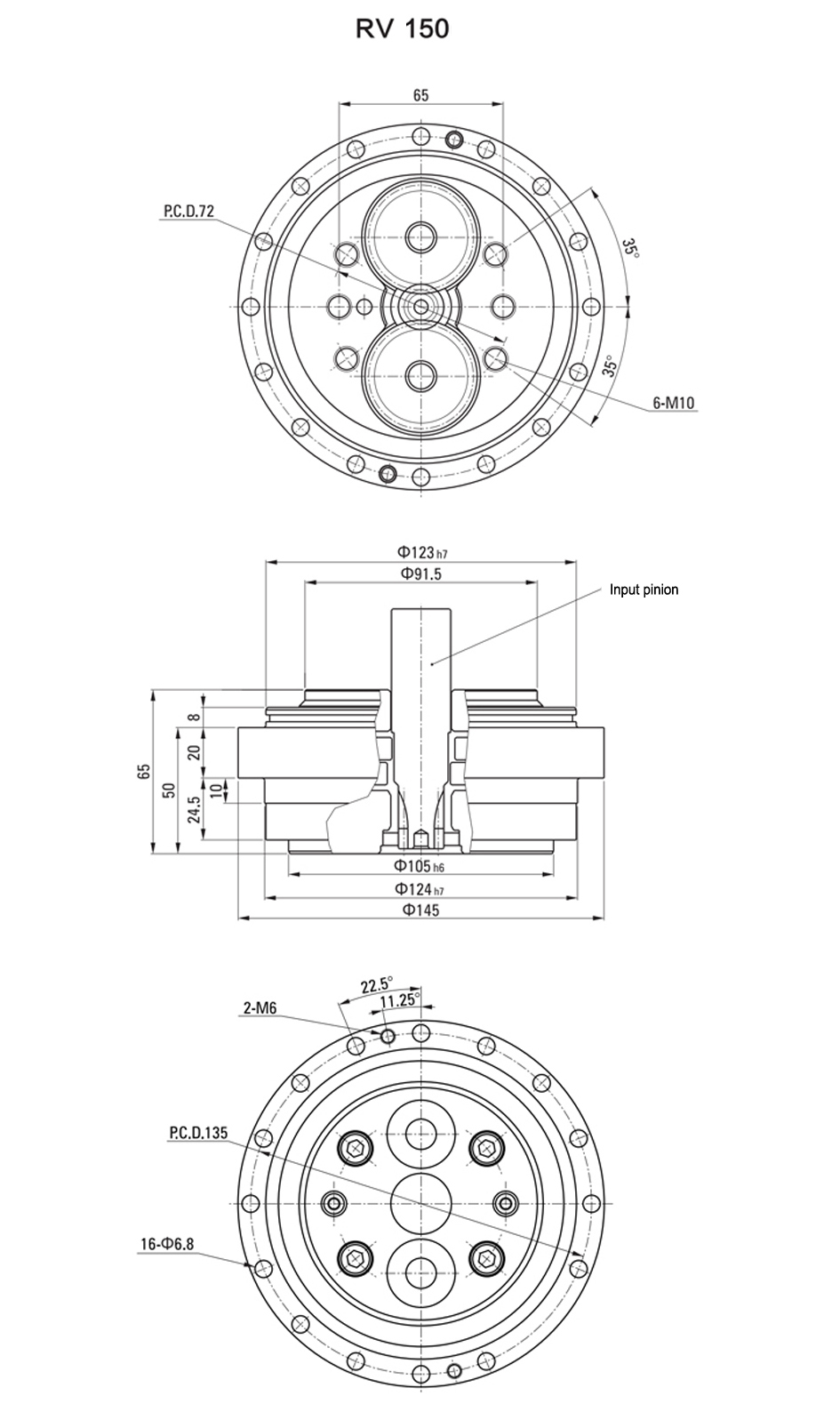
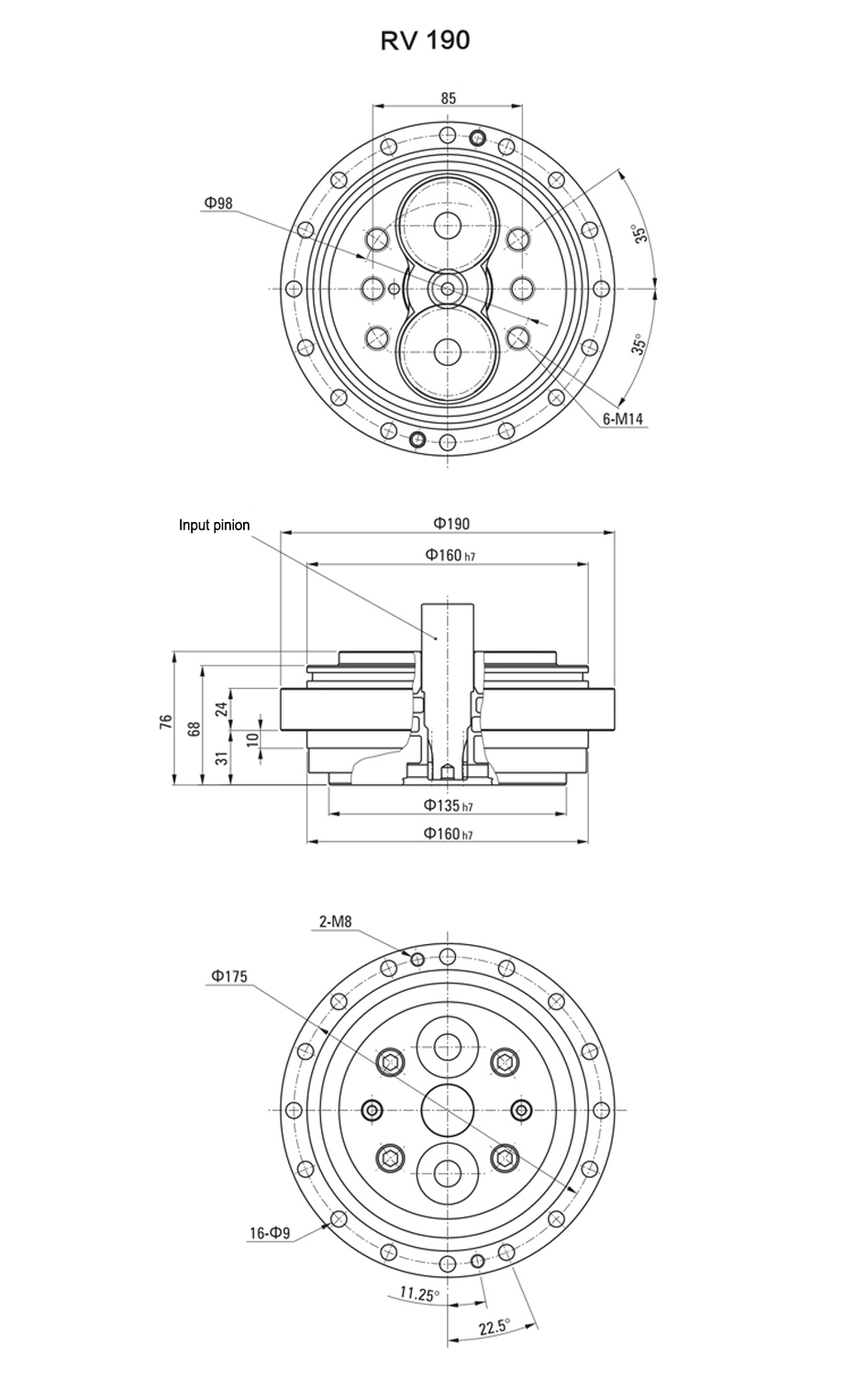
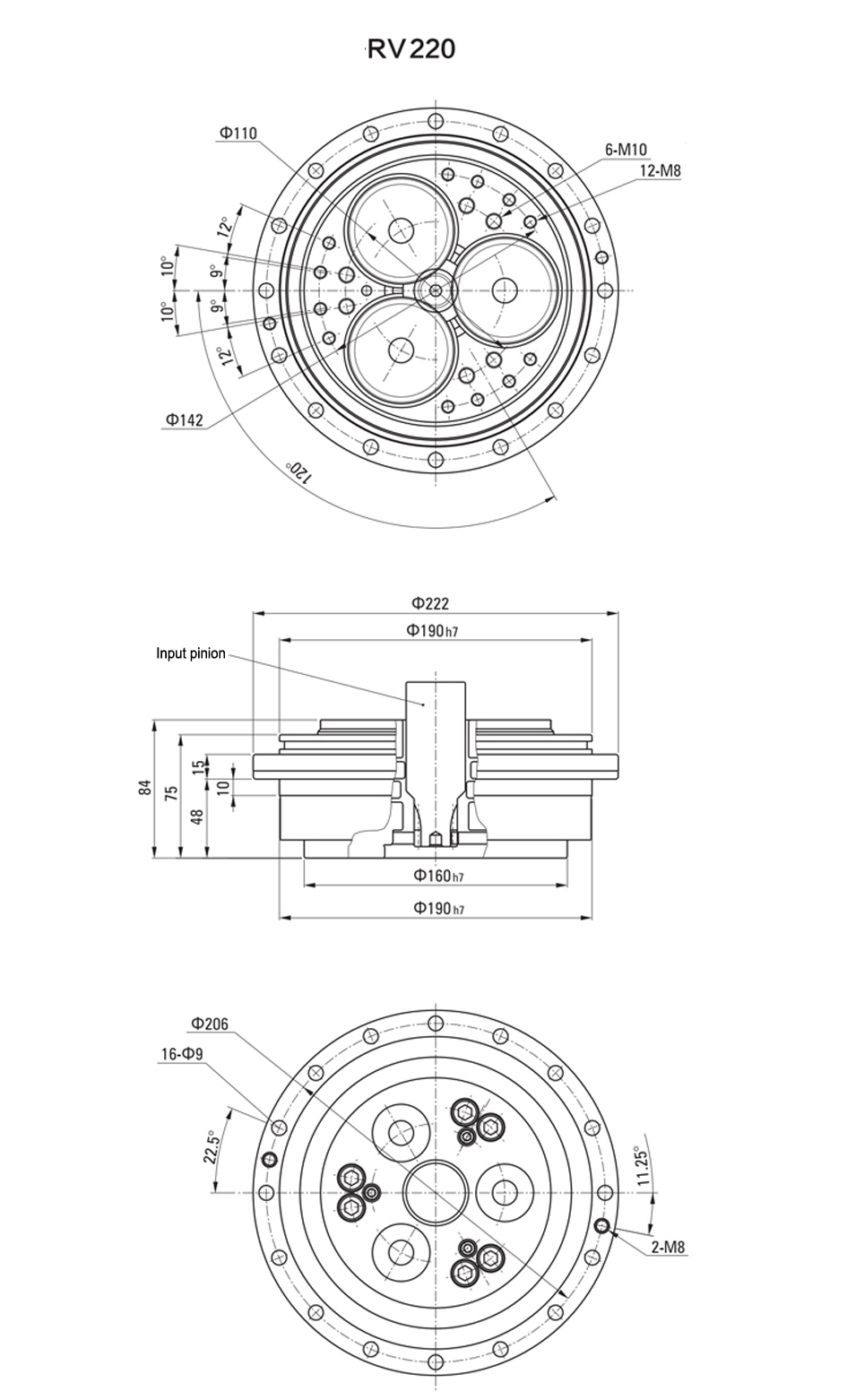
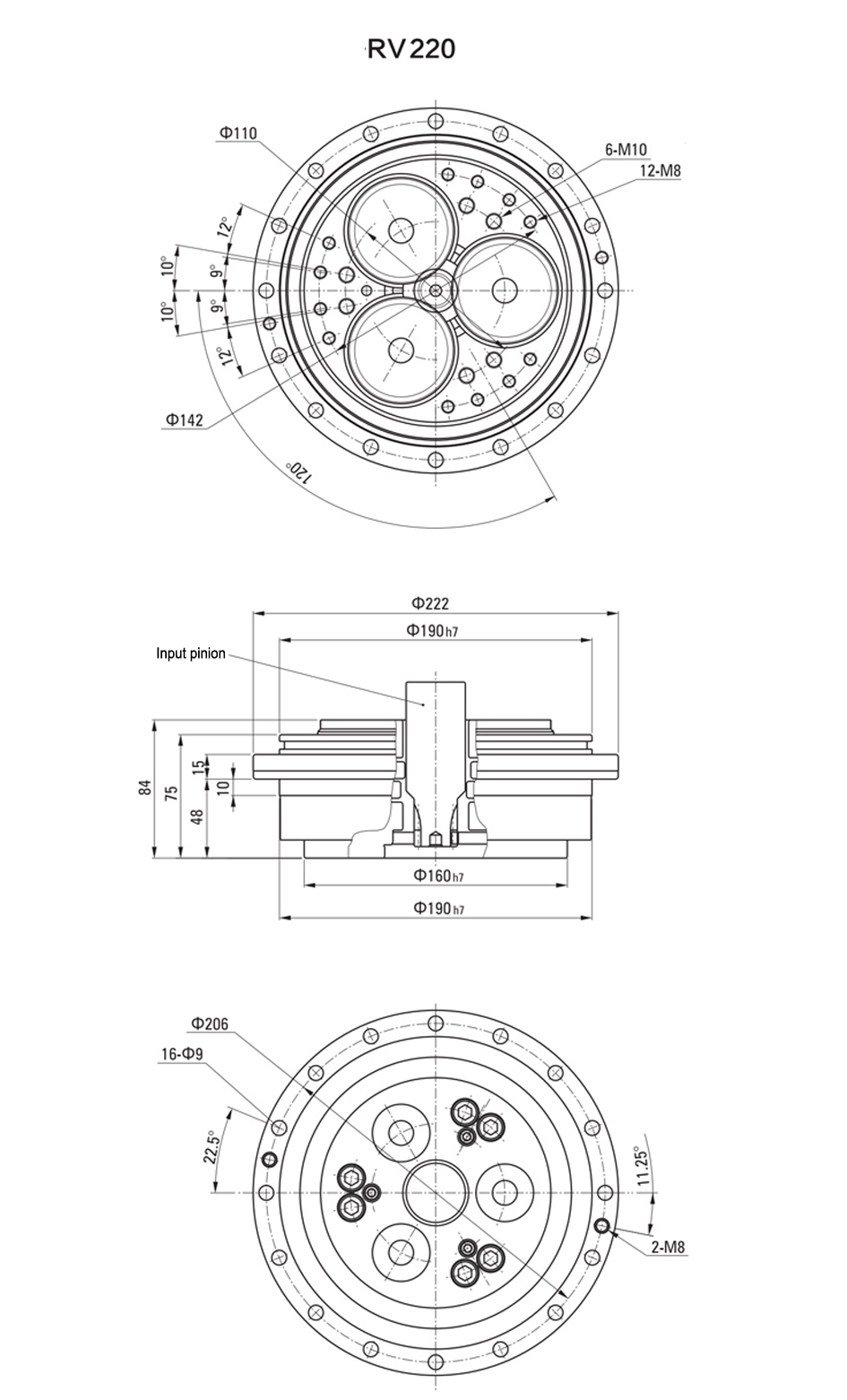
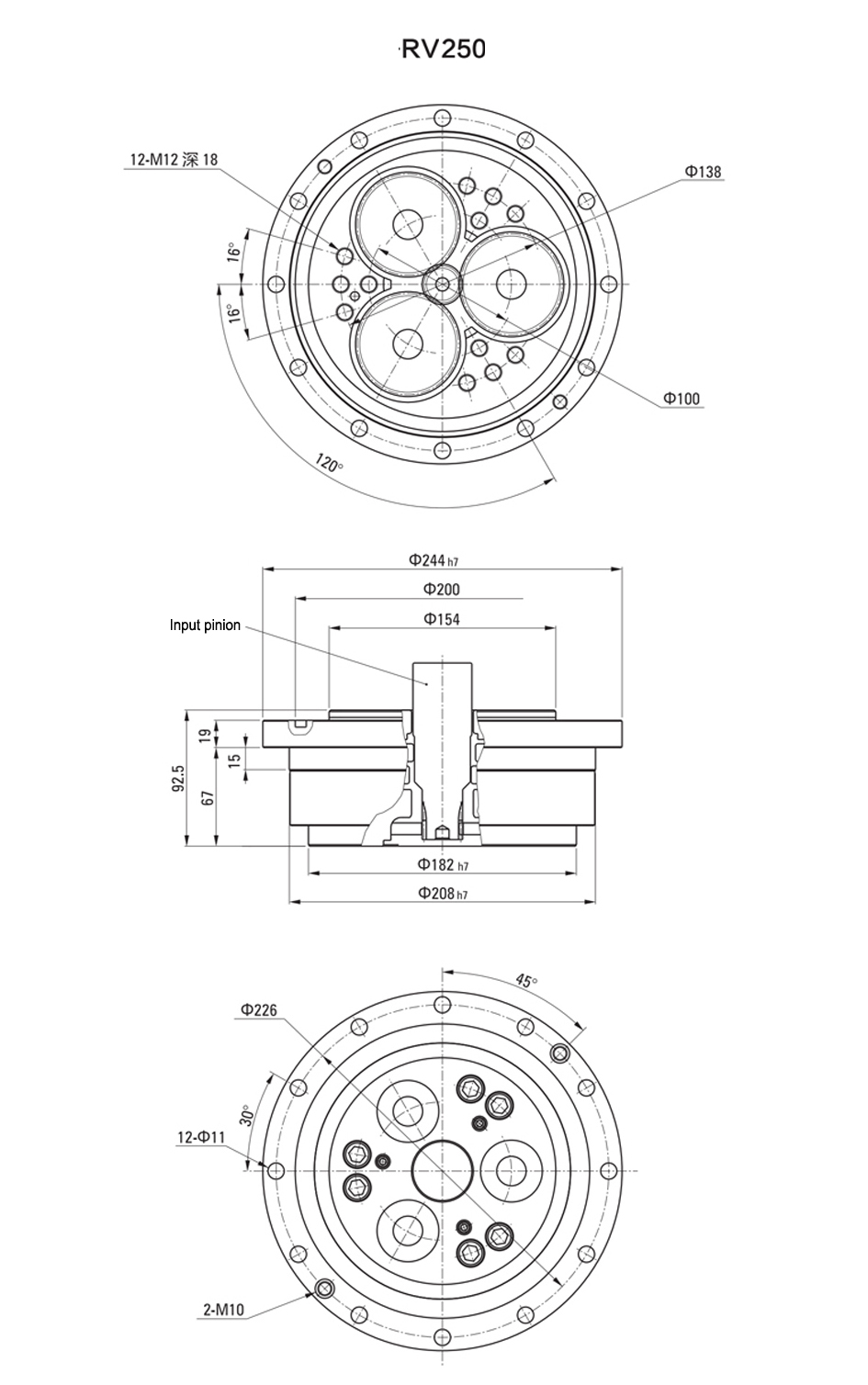
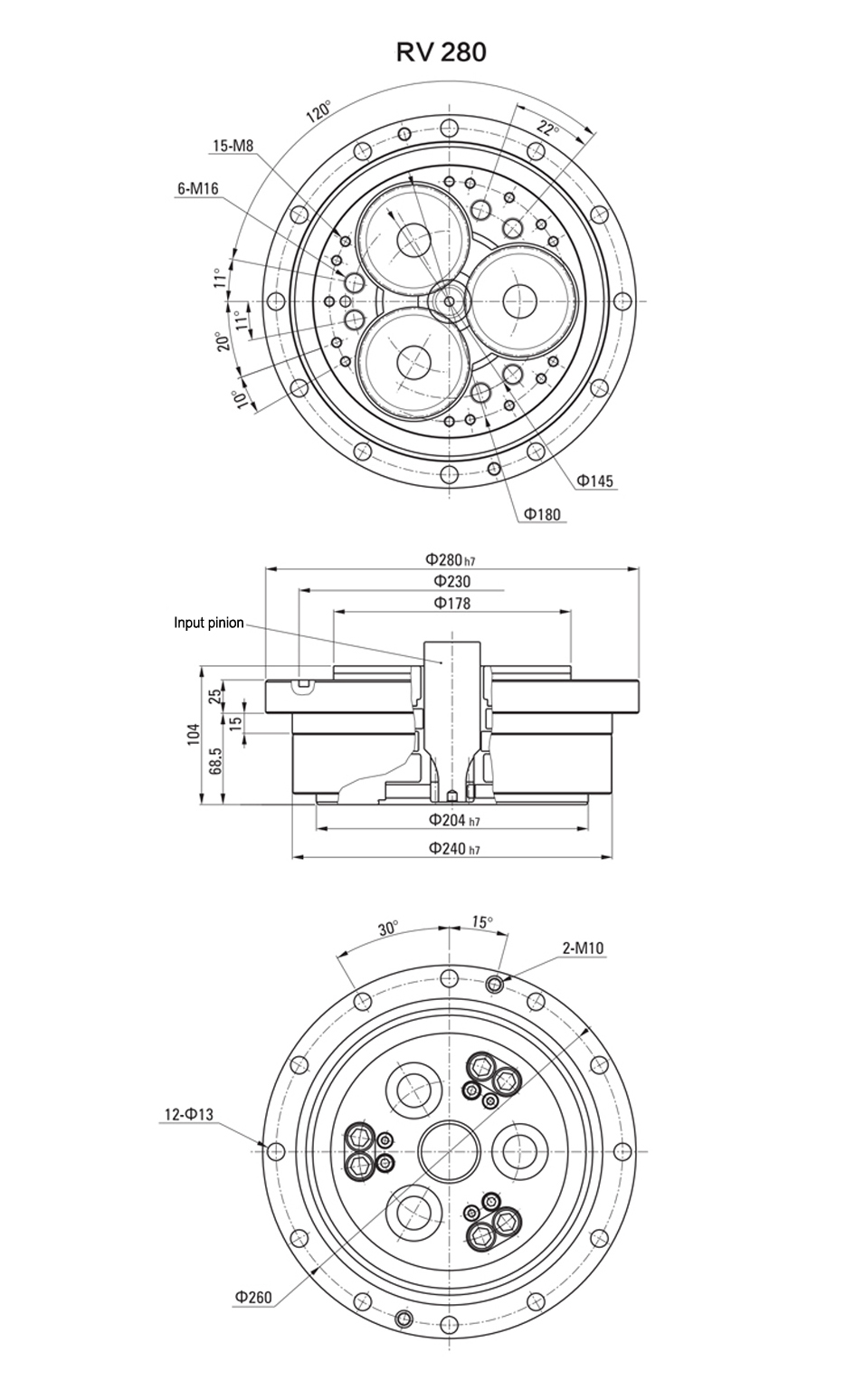
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
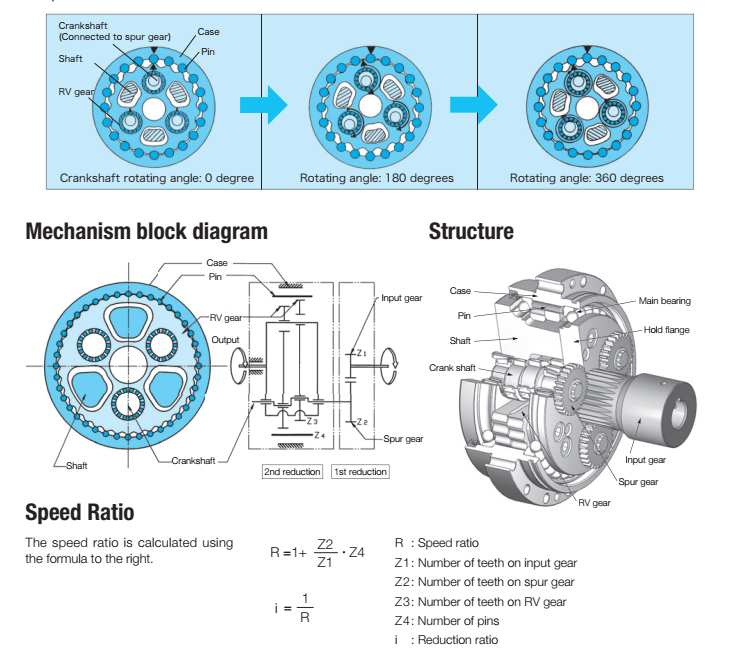
• Qonaxa 1. kêmkirina gear Spur
Amûrek têketinê bi gemarên tîrêjê yên ku bi mîlên crank ve hatine girêdan re têkildar dibe û dizivire. Bi bijartina rêjeyên cihêreng ên qonaxa yekem dikare çend rêjeyên gemarê yên giştî werin peyda kirin.
Qonaxa 2'yemîn Kêmkirina kelûpelên Epicyclic
• Şaftên ku ji hêla pêlavan ve têne rêve kirin dibe sedema tevgerek eccentrîkî ya du kelûmelên epîkklîk ên bi navê gearên RV ku 180 pileyî ji hev dûr in da ku barek hevseng peyda bikin.
• Tevgera eksentrîk a pêlavên RV dibe sedema tevlêbûna diranên gemarê yên bi şeklê cycloidal bi pêlên bi şiklê silindrîk ên ku li dora keviya hundurê dozê ne.
• Di pêvajoyek yek şoreşa şaneyan de diranên pêlava RV-yê dûrahiya yek pîneyê berevajî çîpên zivirî diçin. Tevgera pêlava RV wisa ye ku diran bi pîneyan re di têkiliya nêzîk de dimînin û pir diran bi hevdemî barkirinê parve dikin.
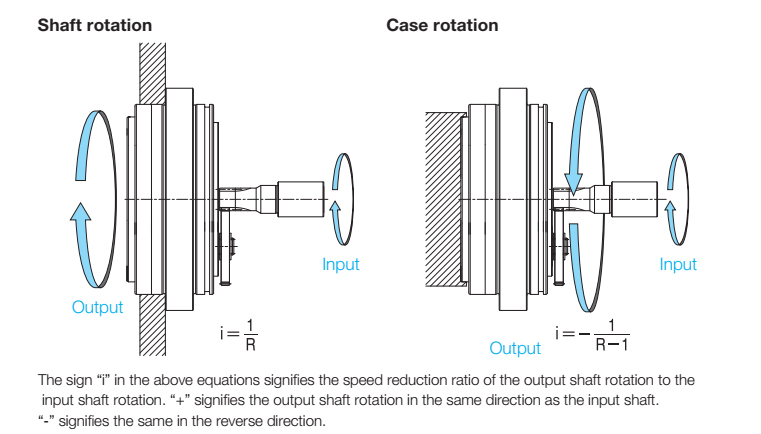
• Hilberîn dikare bibe şaft an jî doz. Ger rewş were sabît kirin, mîlî encam e. Ger şaft sabît be, doz encam e.
Hemî gear bi barkirina bilind, dengek kêm, lerzînek kêm, bêhêziya kêm û jiyanek dirêj, rastbûna bilind ji bo veguheztina kêm di rêça zivirandinê de têne karbur kirin. Mesrefa kêm ji bo hemî serîlêdanê.
Direction of rotation û rêjeya gear
Rêjeya: 41 81 102,17 102,81 107,66 125,21 126 137 156 164,07 141 145,61 161 201 171 75 93 117 139 13 16 16 2.75 105 118 142.44 159 183 203.52
Koda hilberê
Rêjeya leza giştî i (ji qonaxên kêmkirina Yekem û Duyemîn) dê di navbera zivirîna mîlî û zivirîna dozê de cûda be, û dikare ji rêjeya lezê were hesibandin.