ռոբոտի ճշգրիտ փոխանցման միավոր

Չափերը՝ RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
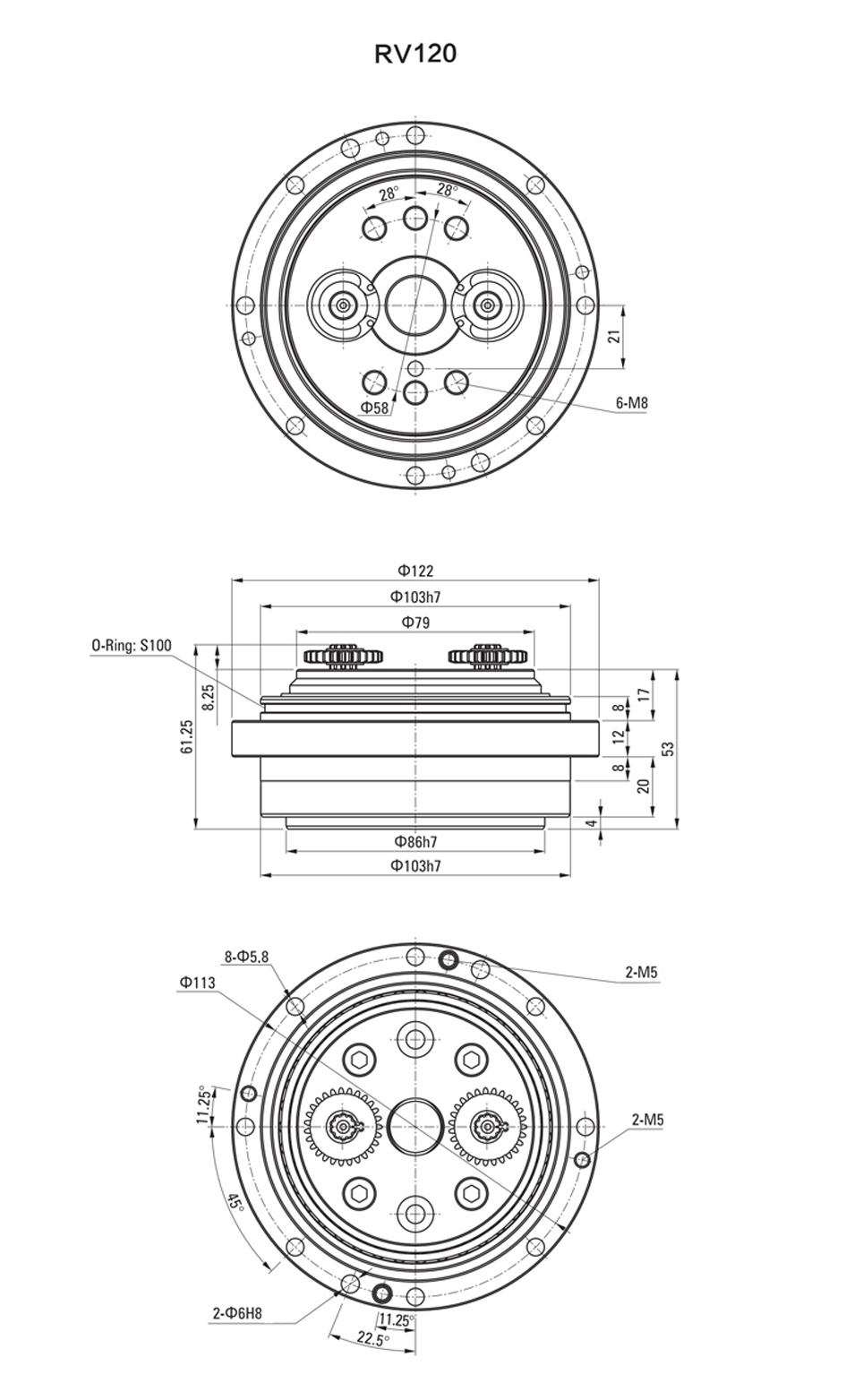
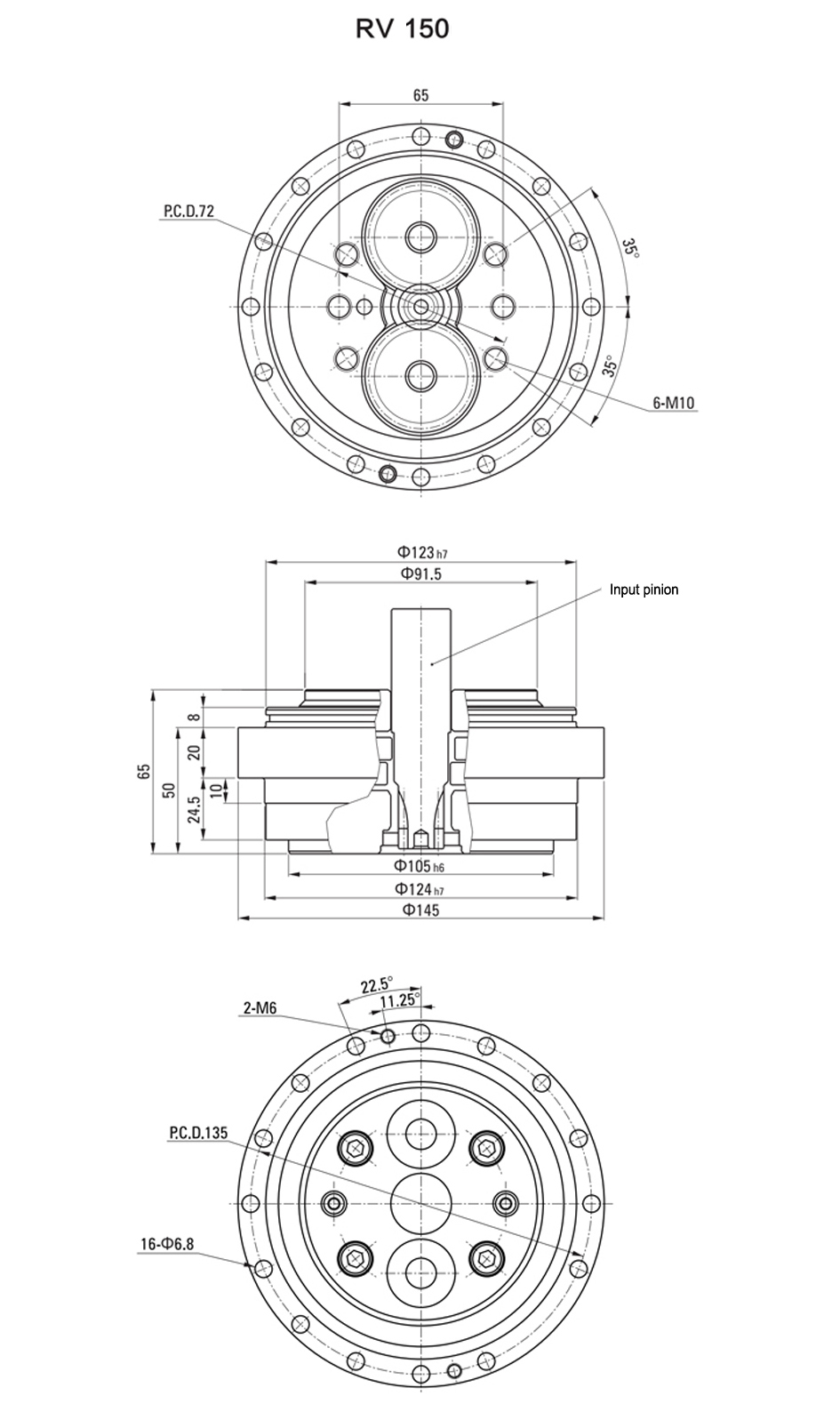
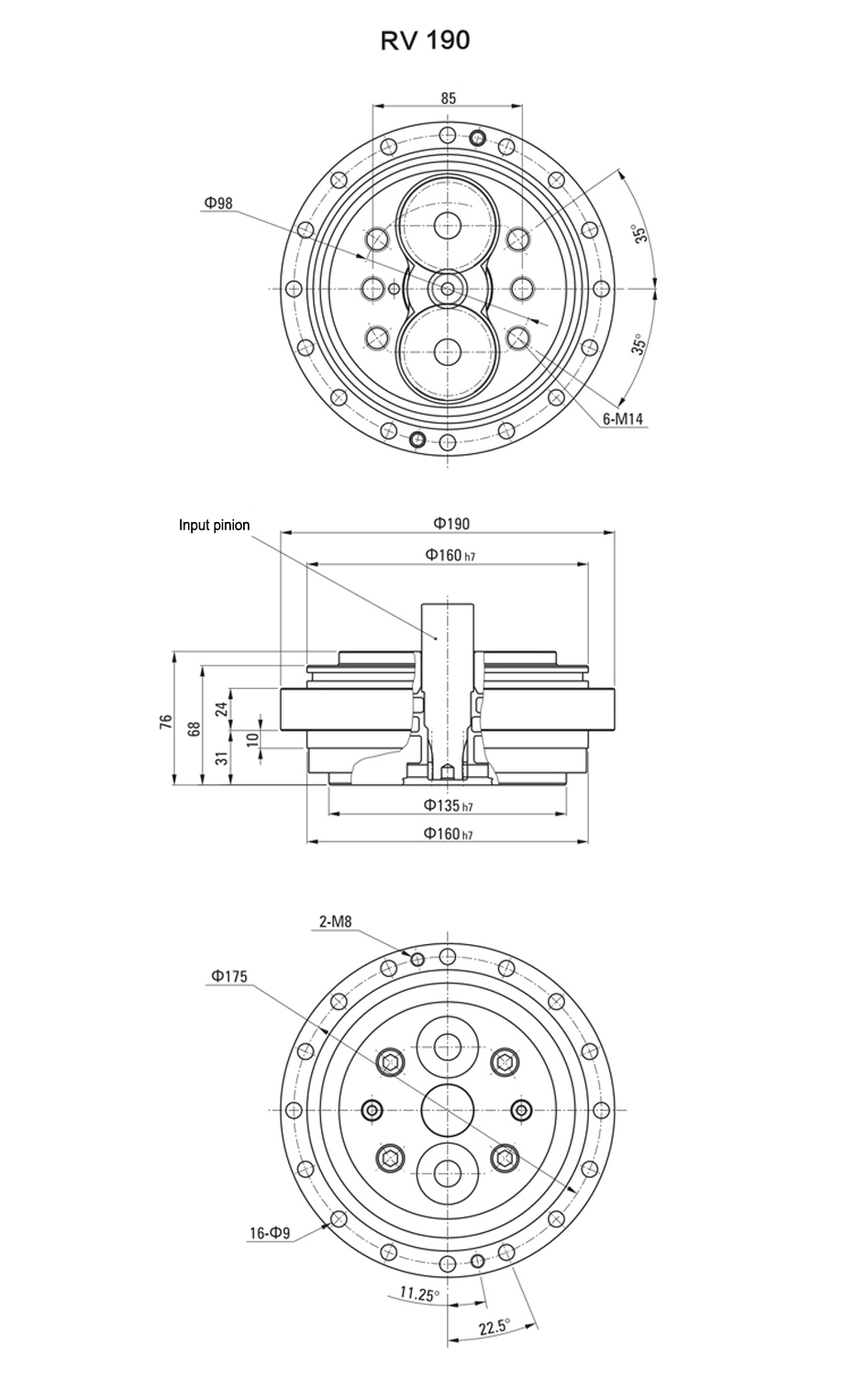
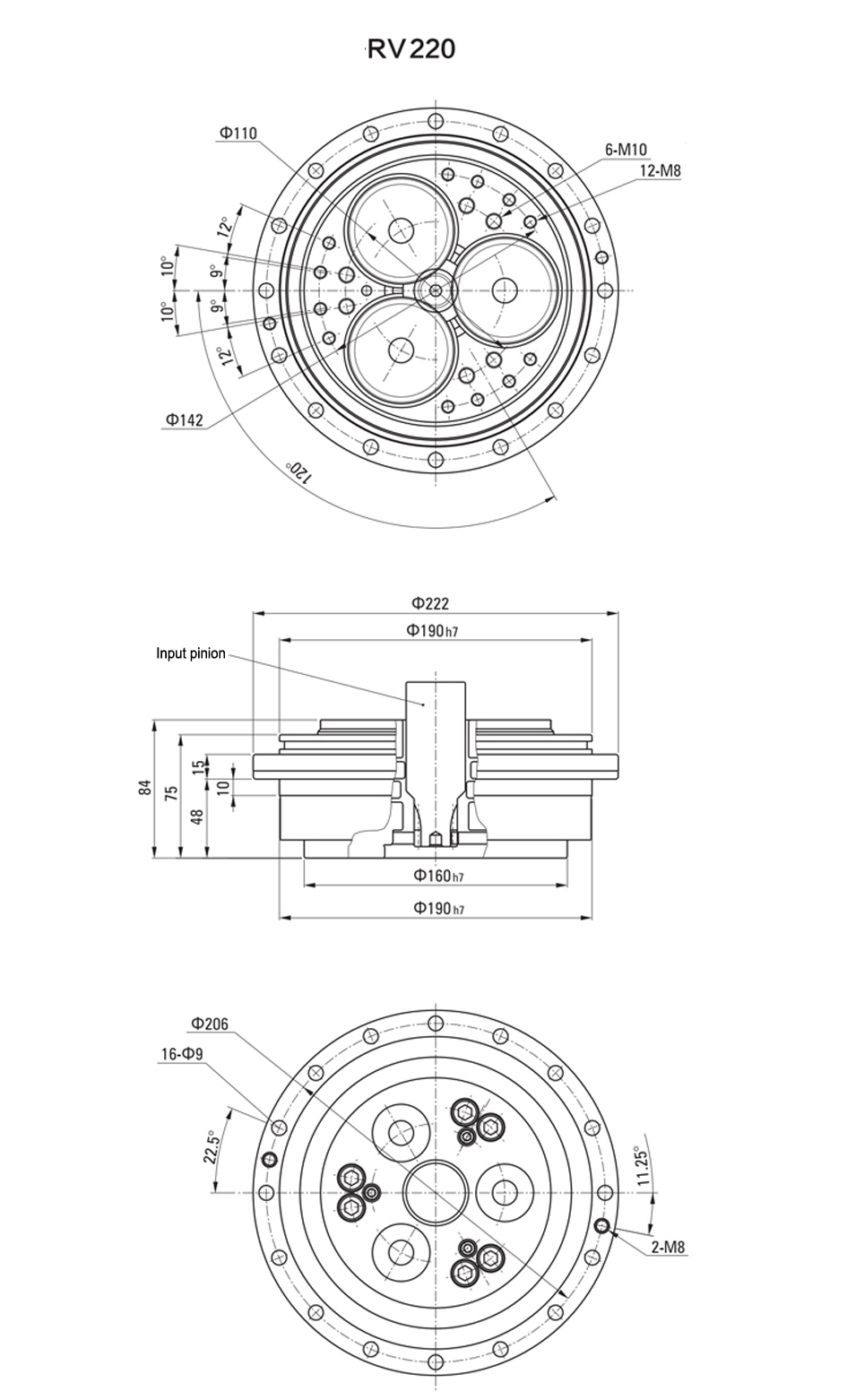
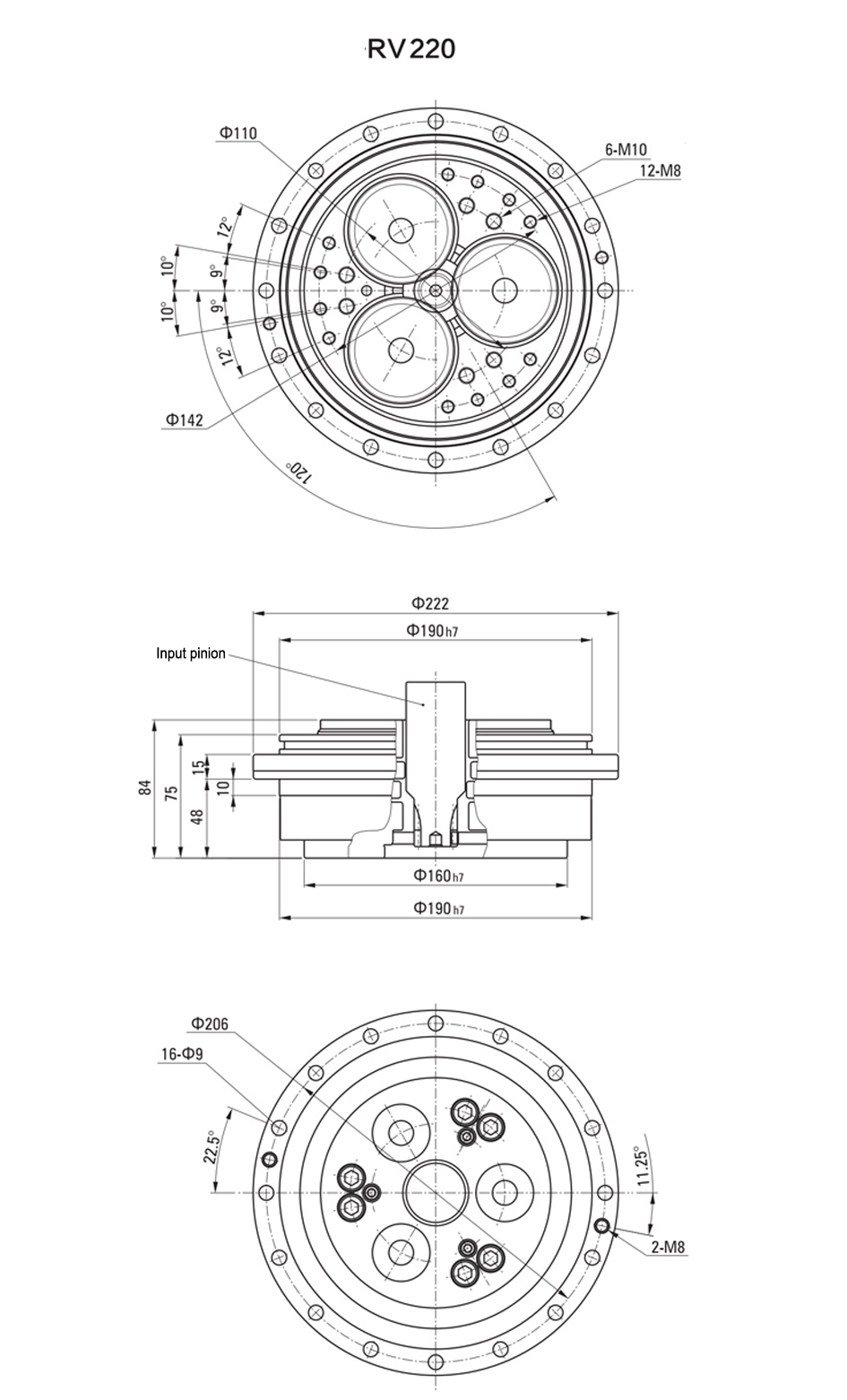
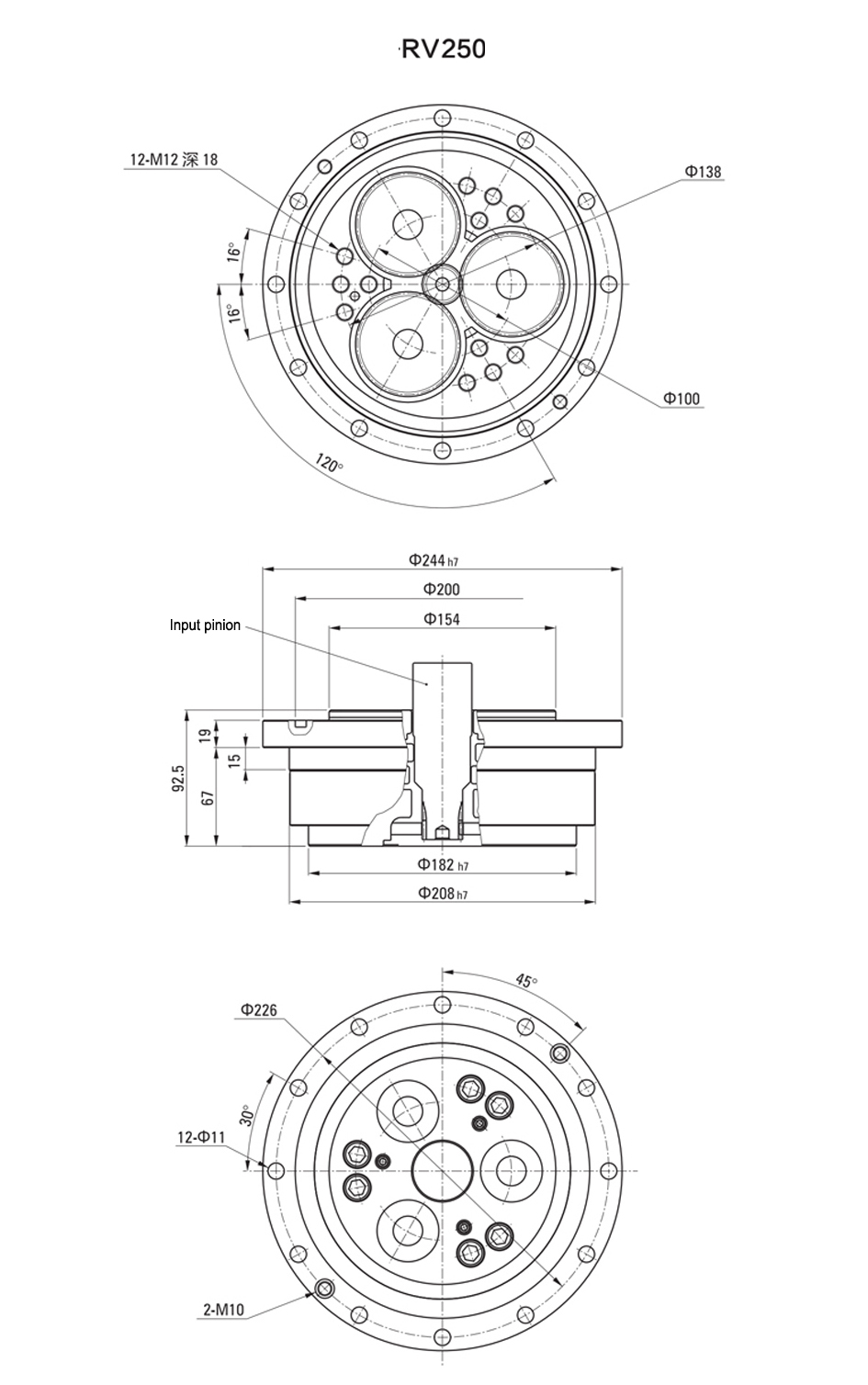
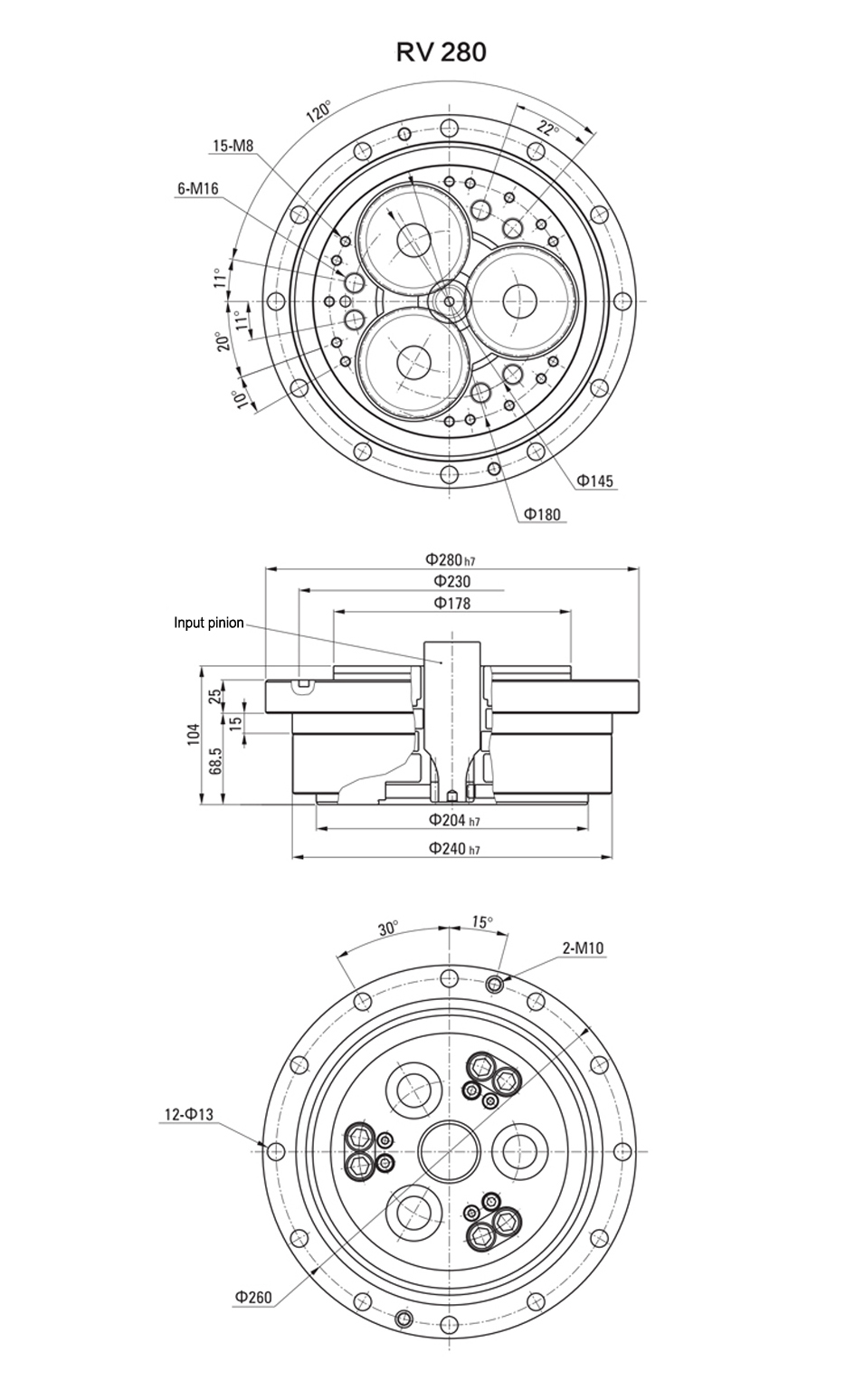
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
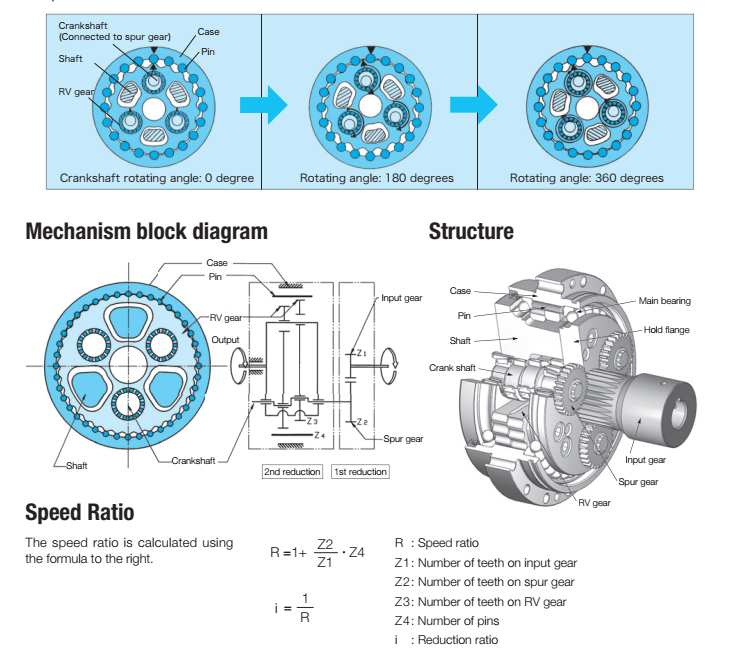
• 1-ին փուլ Spur հանդերձանքի կրճատում
Մուտքային հանդերձանքը միանում և պտտվում է պտտվող շարժակների հետ, որոնք միացված են ծնկաձև լիսեռներին: Մի քանի ընդհանուր փոխանցման գործակիցներ կարող են տրամադրվել՝ ընտրելով տարբեր առաջին փուլի գործակիցներ:
2-րդ փուլ Էպիցիկլիկ հանդերձանքի կրճատում
• Սուր շարժակների կողմից շարժվող ծնկաձև լիսեռները առաջացնում են երկու էպիցիկլիկ շարժակների էքսցենտրիկ շարժում, որոնք կոչվում են RV շարժակներ, որոնք միմյանցից 180 աստիճանով շեղված են՝ ապահովելու հավասարակշռված բեռ:
• RV շարժակների էքսցենտրիկ շարժումը հանգեցնում է ցիկլոիդային ձևի փոխանցման ատամների միացմանը գլանաձև ձևի պտուկներով, որոնք գտնվում են պատյանի ներքին եզրի շուրջը:
• Ծղկաձև լիսեռների մեկ պտույտի ընթացքում RV հանդերձանքի ատամները մեկ պտուտակի հեռավորությունը տեղափոխում են պտտվող լիսեռների հակառակ ուղղությամբ: RV հանդերձանքի շարժումն այնպիսին է, որ ատամները սերտ շփման մեջ են մնում կապում, և մի քանի ատամները միաժամանակ կիսում են բեռը:
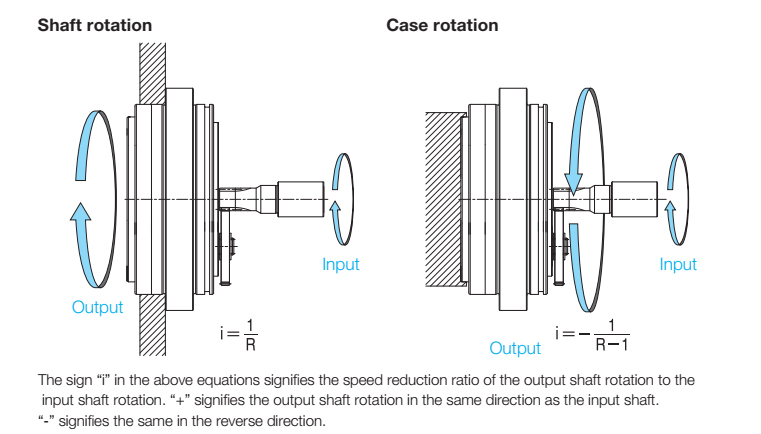
• Ելքը կարող է լինել կամ լիսեռը կամ պատյանը: Եթե գործը ամրագրված է, ապա լիսեռը ելքն է: Եթե լիսեռը ամրագրված է, գործը ելքն է:
Բոլոր փոխանցումները կարբյուրացված են բարձր բեռով, ցածր աղմուկով, ցածր թրթռումով, ցածր իներցիայով և երկար կյանքով, բարձր ճշգրտությամբ՝ պտտվող ուղղությամբ ցածր շեղումների համար: Ցածր արժեք բոլոր կիրառման համար:
Պտտման ուղղությունը և փոխանցման հարաբերակցությունը
41 81 102.17 102.81 107.66 125.21 126 137 156 164.07 141 145.61 161 201 171 75 93 117 139151 16 2.75 105 118 142.44 159 183 203.52
Ապրանքի կոդը
Արագության ընդհանուր հարաբերակցությունը i (Առաջին և Երկրորդ նվազեցման փուլերի) կտարբերվի լիսեռի պտտման և պատյանի պտտման միջև և կարող է հաշվարկվել արագության հարաբերակցությունից: