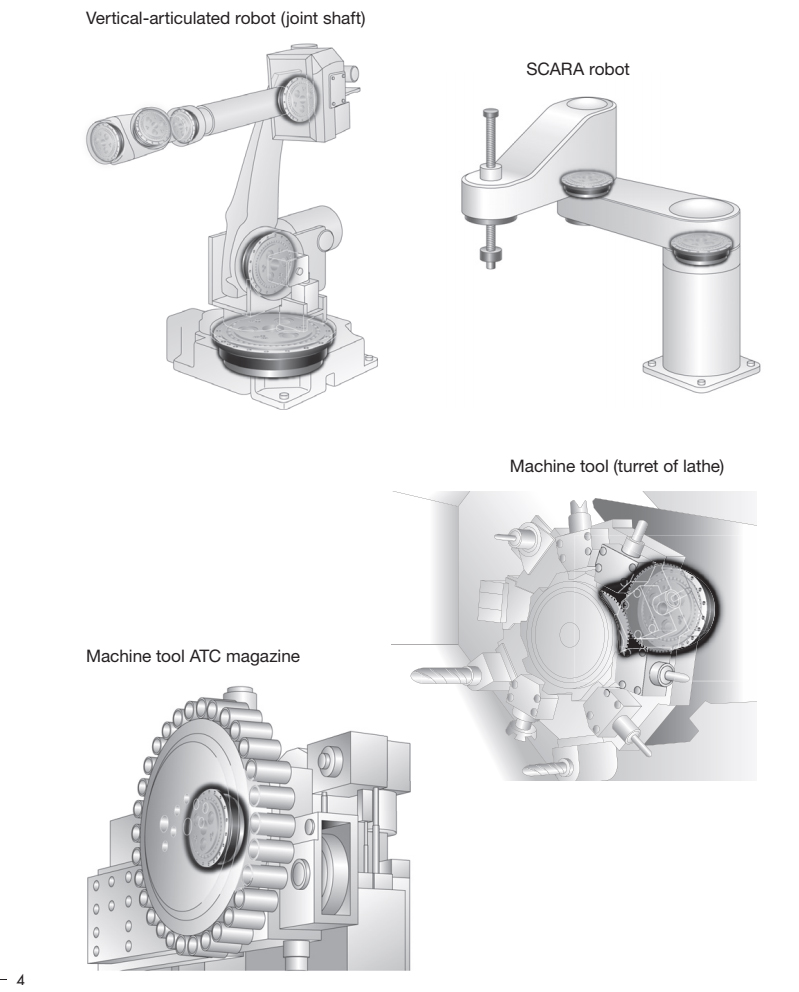
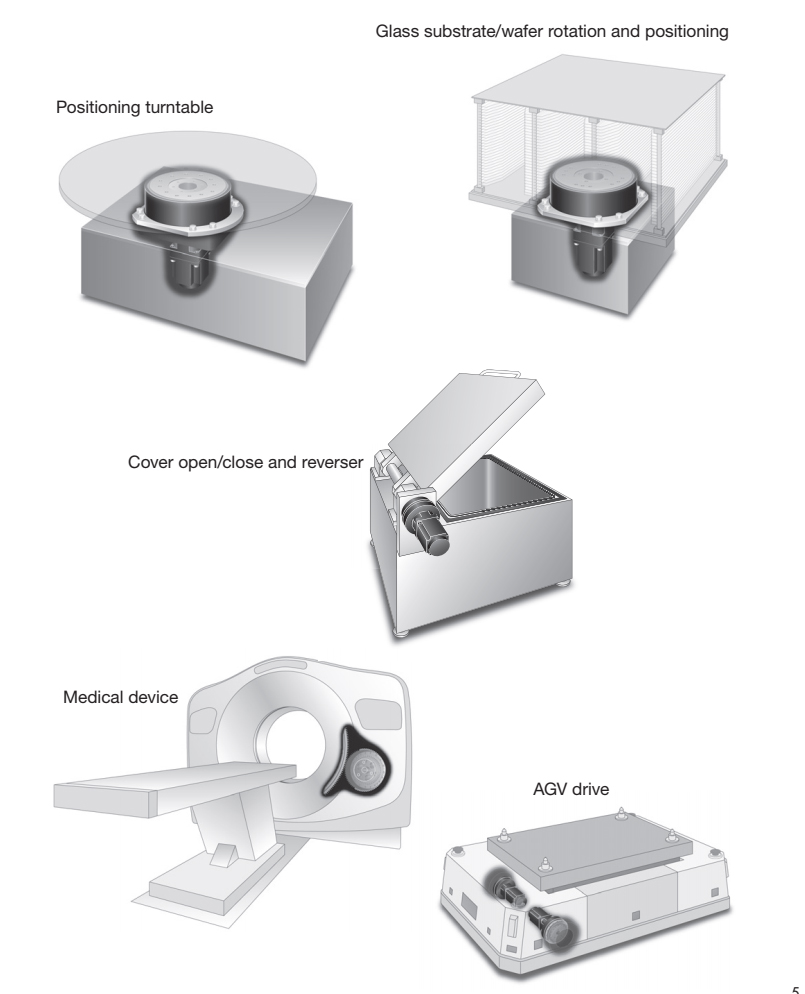
roboti täppiskäigukast

Suurused: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
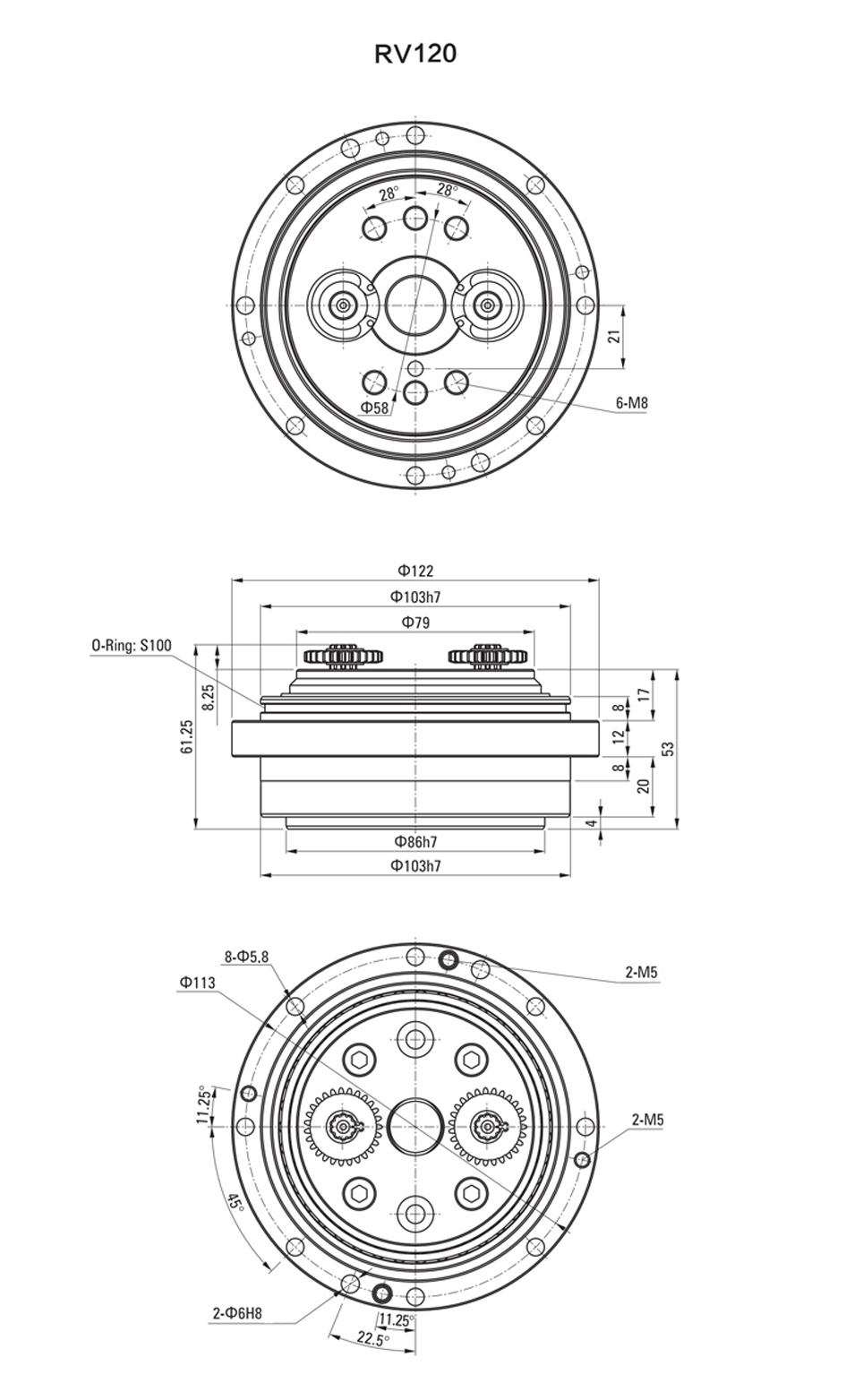
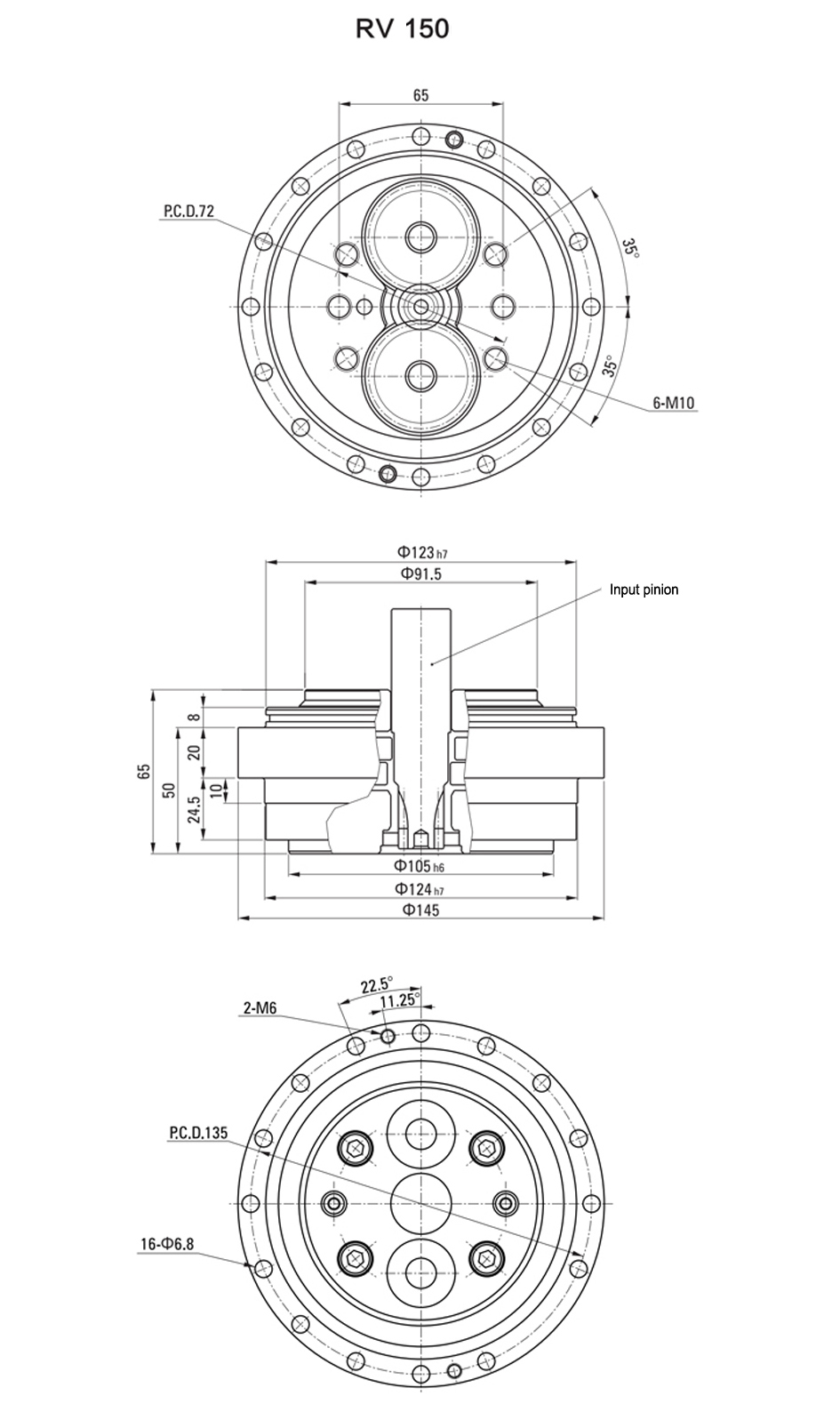
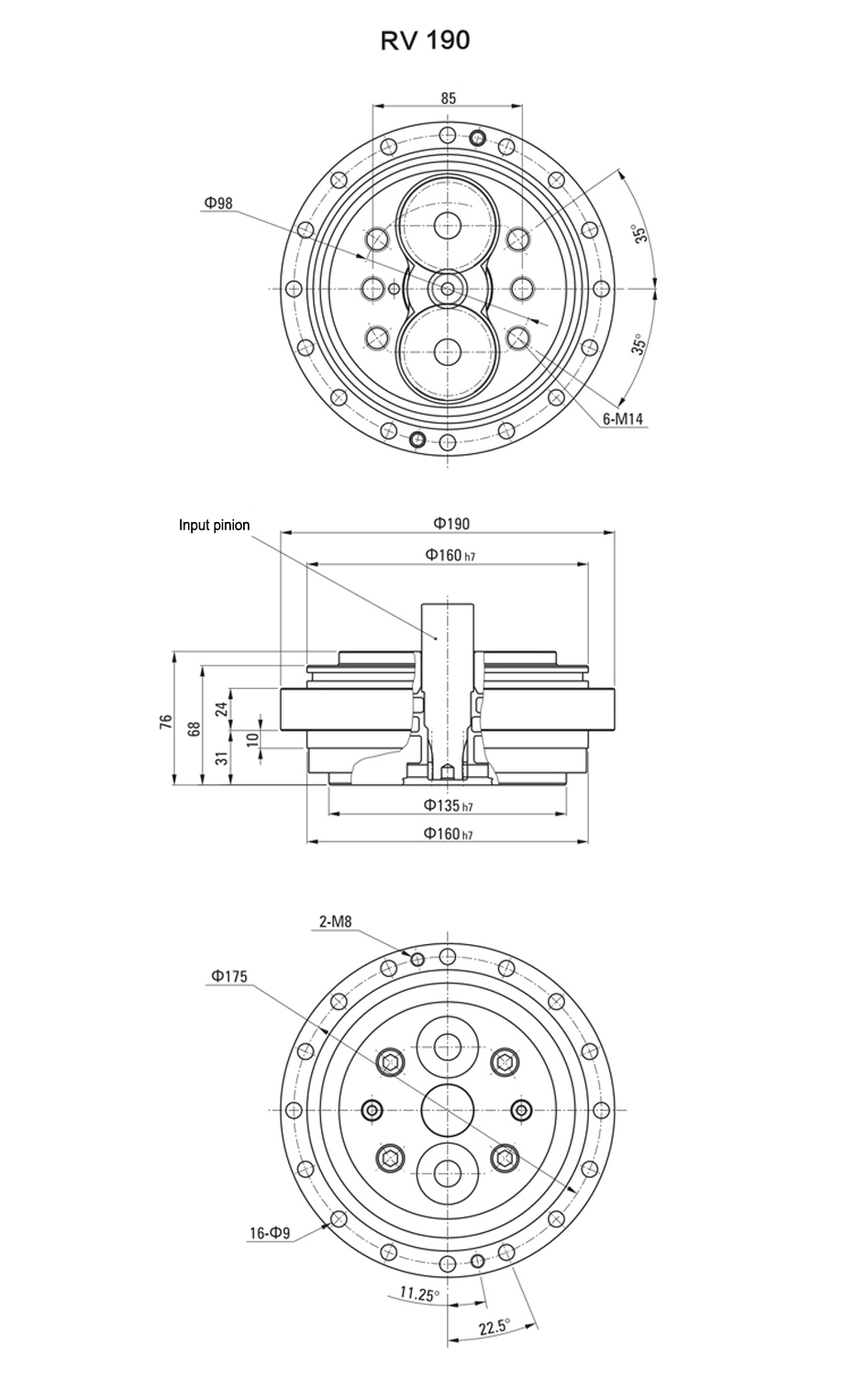
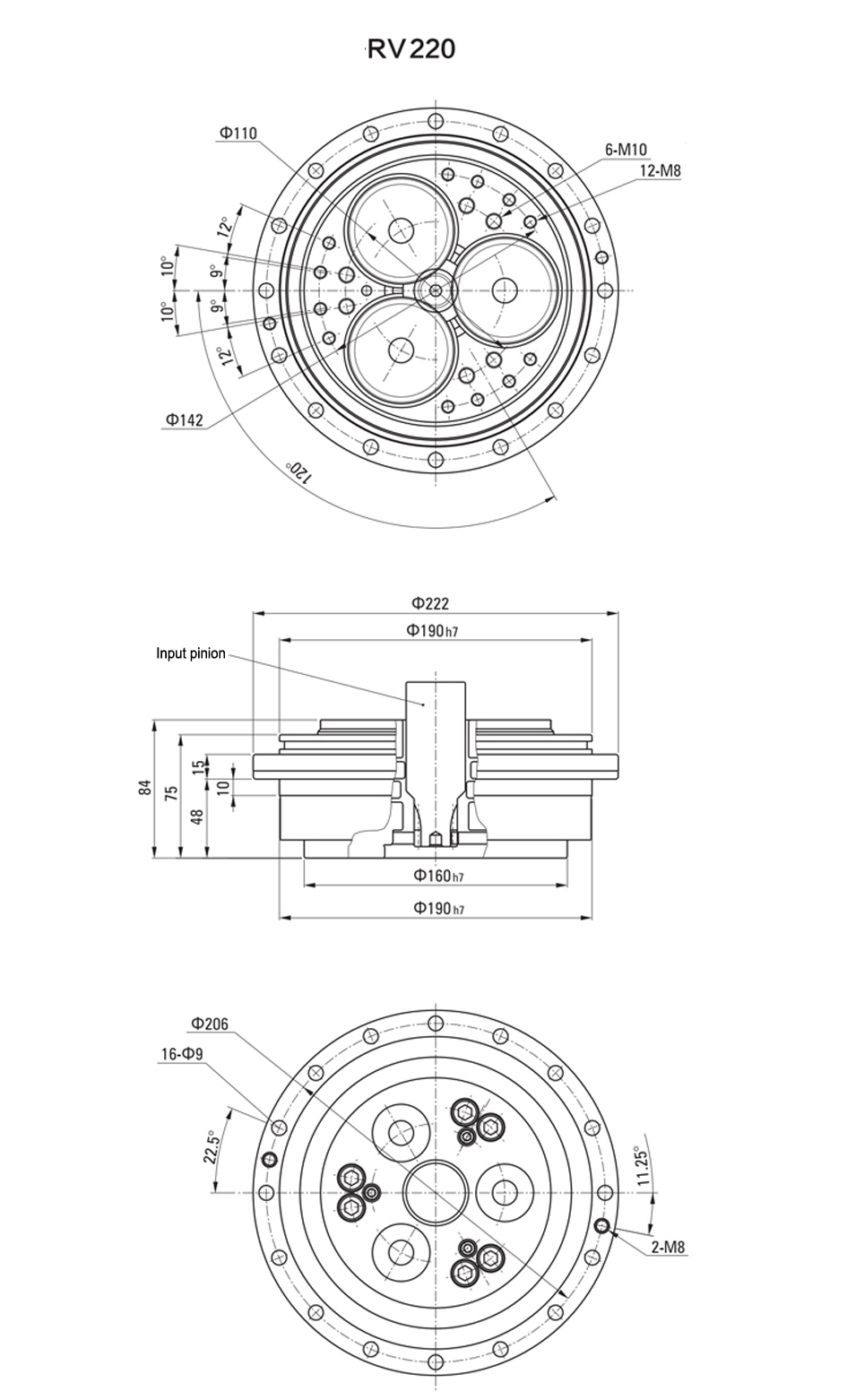
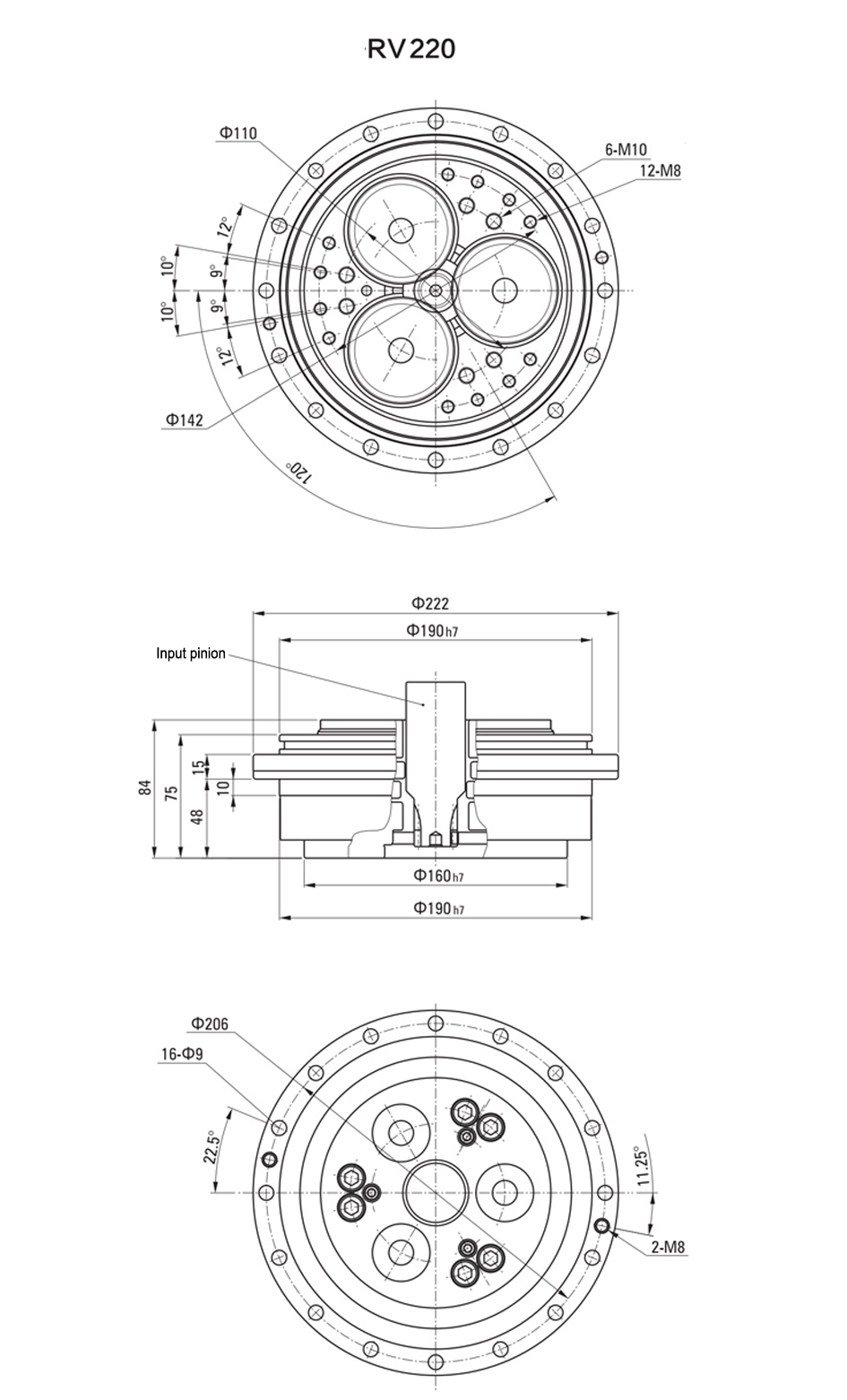
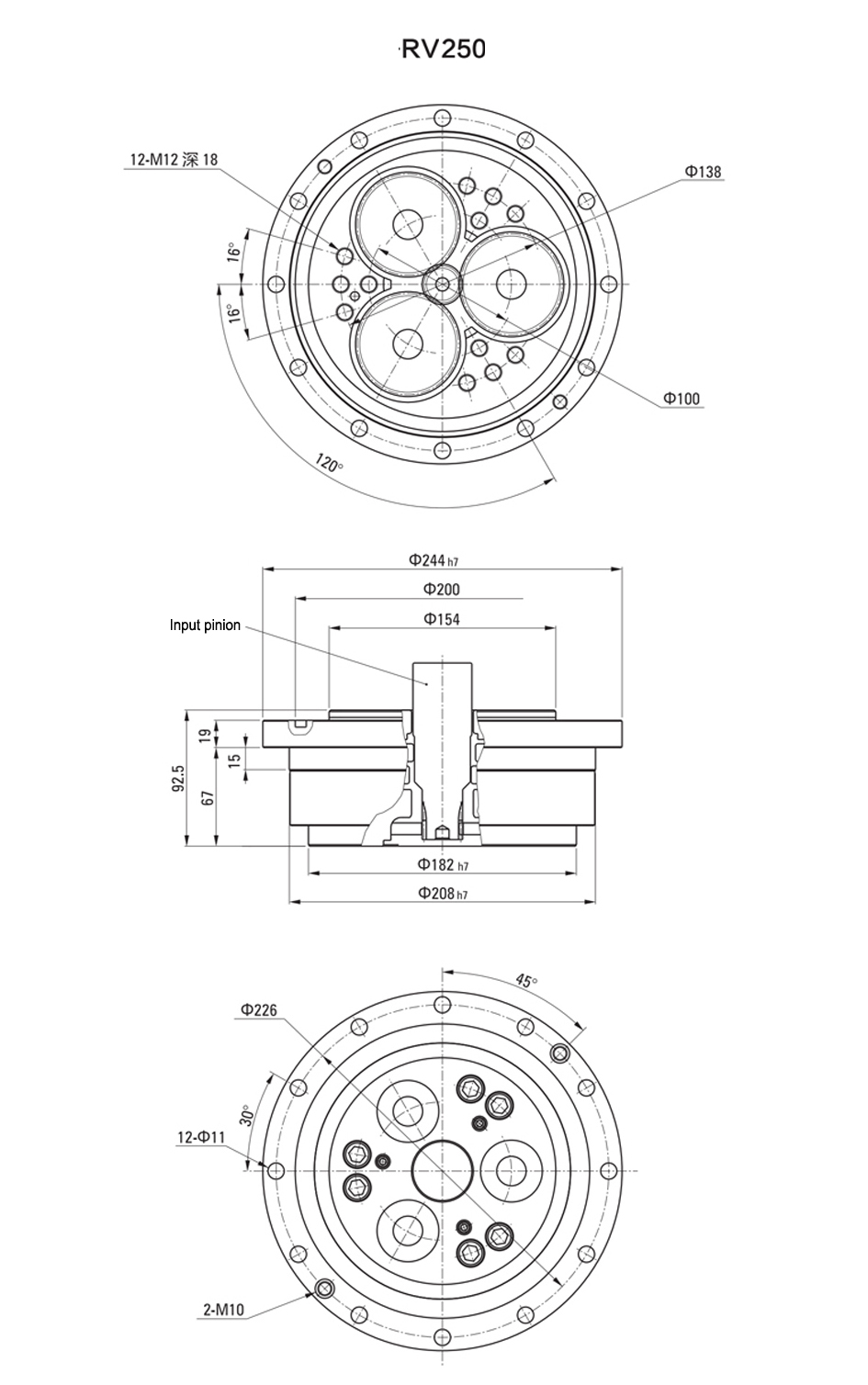
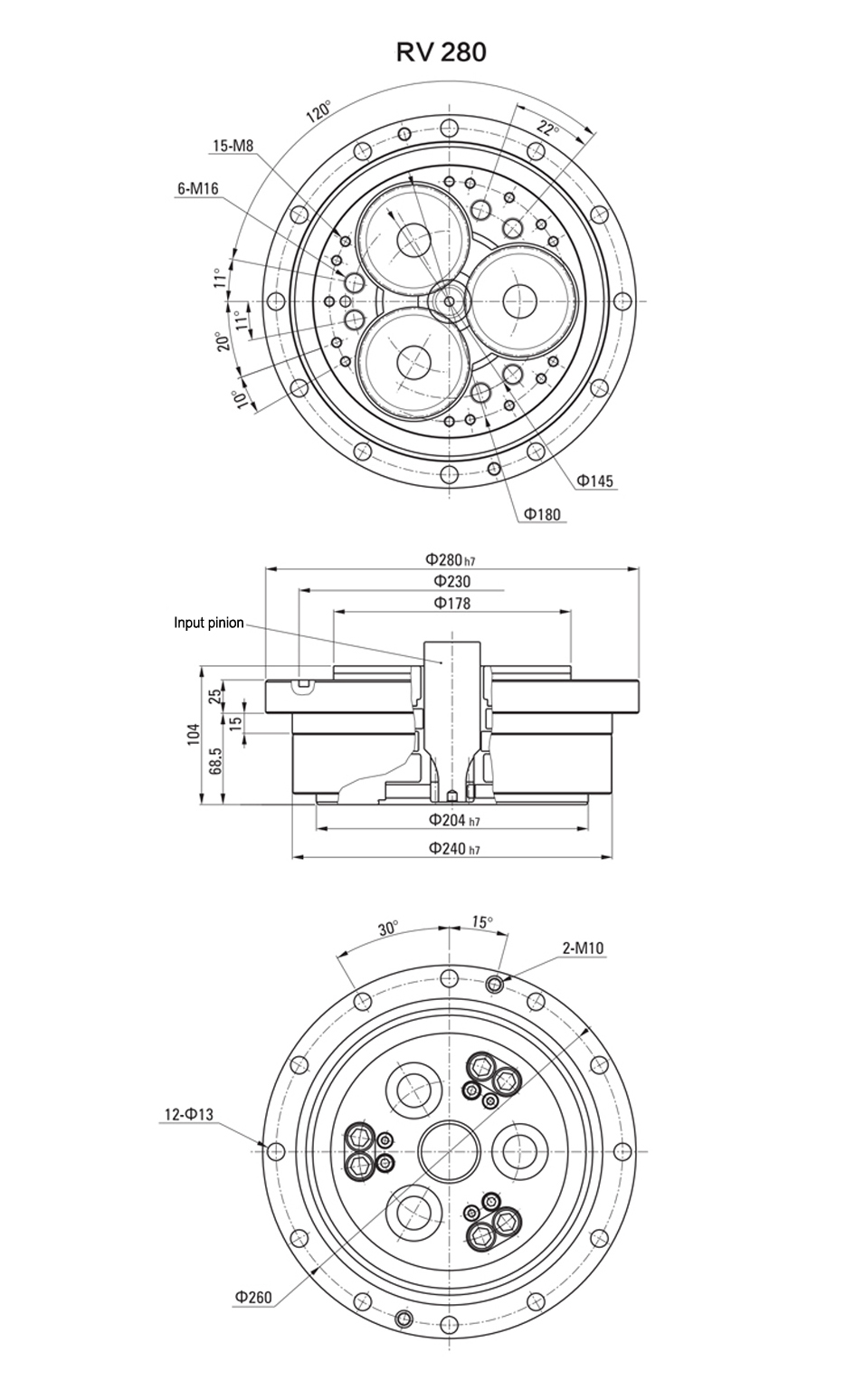
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
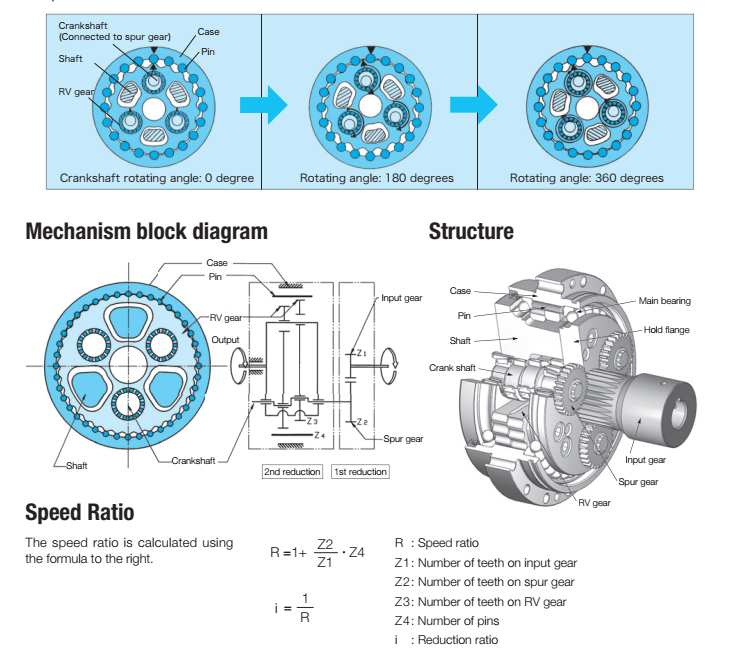
• 1. etapp Spur käigu vähendamine
Sisendülekanne haakub ja pöörab väntvõllidega ühendatud timmiülekandeid. Erinevate esimese astme ülekandearvude valimisel saab pakkuda mitut üldist ülekandearvu.
2. etapp Epitsükliline käigu vähendamine
• Silindri hammasrataste käitatavad väntvõllid põhjustavad kahe epitsüklilise käigu, mida nimetatakse RV hammasratasteks, ekstsentrilise liikumise, mis on tasakaalustatud koormuse tagamiseks üksteisest 180 kraadi nihutatud.
• RV hammasrataste ekstsentriline liikumine põhjustab tsükloidse kujuga hammasratta hammaste haardumise silindrilise kujuga tihvtidega, mis asuvad ümber korpuse siseserva.
• Väntvõllide ühe pöörde käigus liiguvad RV hammasratta hambad ühe tihvti kaugusele pöörlevatele vändadele vastupidises suunas. RV hammasratta liikumine on selline, et hambad jäävad tihvtidega tihedasse kontakti ja mitu hammast jagavad koormust samaaegselt.
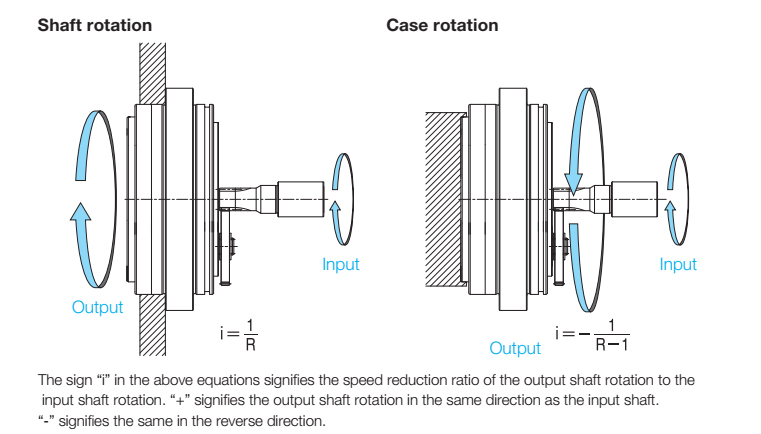
• Väljund võib olla kas võll või korpus. Kui korpus on fikseeritud, on võll väljundiks. Kui võll on fikseeritud, on korpus väljund.
Kõik käigud on karburiseeritud suure koormuse, madala mürataseme, madala vibratsiooniga, väikese inertsiga ja pika elueaga, kõrge täpsusega, mis tagab väikese kõrvalekalde pöörlemissuunas. Madal hind kogu rakenduse jaoks.
Pöörlemissuund ja ülekandearv
Ratsioon: 41 81 102,17 102,81 107,66 125,21 126 137 156 164,07 141 145,61 161 201 171 75 93 117 139 1641213 2,75 105 118 142,44 159 183 203,52
Tootekood
Üldine kiiruse suhe i (esimese ja teise reduktsioonietapi puhul) erineb võlli pöörlemise ja korpuse pöörlemise vahel ning seda saab arvutada kiiruse suhte põhjal.